img172 (7)
172
ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej*
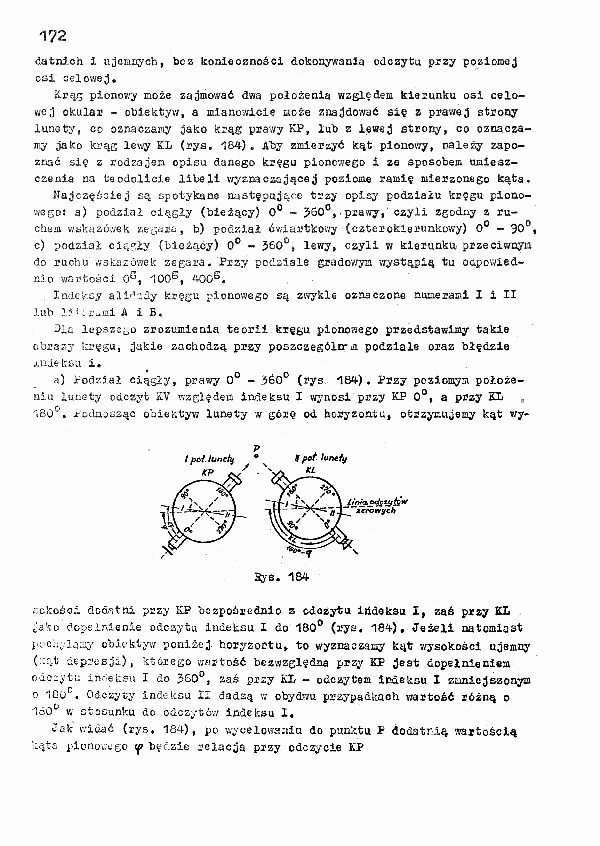
Krąg pionowy noże zajmować dwa położenia względęia kierunku osi celowe;] okular - obiektyw, a mianov/icie może znajdować się z prawej strony luno ty, co oznaczany jako krąg prawy KP, lub z lewej strony, co oznaczamy jako krąg lewy KL (rys. 184) . Aby zmierzyć kąt pionowy, należy zapo-ztiać się z rodzajem opisu danego kręgu pionowego i zo sposobem umieszczenia aa teodolicie libeli wyznaczającaj poziome ramię mierzonego kąta.
Najczęściej są spotykano następujące trzy opJ.sy podziału kręgu pionowego: a) podział ciągły (bieżący) 0° - ?60°,•prawy,' czyli zgodny z ruchem wskazówek zegeja, b) podział ćwiartkowy (czterckierunkowy) 0° — 90°, c) podział ciągły (bieżący) 0° - 360u, lewy, czyli w kierunku przeciwnym do ruchu wskazówek zegara. Exzy podziale gradowym wystąpią tu oapowied-nio wartości O6, 1006, 'łOGs.
Indeksy a lipidy kręgu pionowego są zwykle oznaczone numerami I i II lub A i B.
lepszego zrozumienia teorii kręgu pionowego przedstawimy takie obrazy kręgu, jakie zachodzą przy poszczegćltrm podziale oraz błędzie
indeksu i*
a) jrodzSał ciągły, prawy 0° - 360° (rys 184). Przy poziomym położeniu lunety odczyt KV względem indeksu I wynosi przy KP 0°, a przy KL 180°. ^ctkusząc obiektyw lunety n górę od horyzontu, otrzymujemy kąt wy-
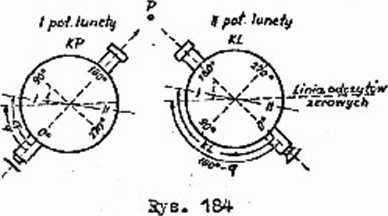
.:ckości dodatni przy KP bezpośrednio z cdozytu iddoksu I, zaś przy KL jako dopełnienie odczytu indeksu I do 180° (rys. 184), Jeżeli natomiast Kchylaay obiektyw poniżej horyzontu, to wyznaczamy kąt wysokości ujemny (::ąt depresji), którego wartość bezwzględna przy KP jest dopełnieniem odczytu indeksu I do 360°, zaś przy KL - odczytem indeksu I zmnicjszonyo o 1G«dc. Odczyty indeksu II dadzą v; obydwu przypadkach wartość różną o 1ćOŁ’ v. stosunku do odczytów indeksu X*
2fik widać (rys, 184), po wycelowania do punktu P doda tną wartością kąta pionowego <f będzie relacja przy odczycie KP
Wyszukiwarka
Podobne podstrony:
img172 (7) 172 ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej* K
img172 (7) 172 ćatnich i ujemnych, bez konioozności dokonywania odczytu przy poziomej cni celowej* K
img172 1?2 ćatnich i ujemnych, bez konieozności dokonywania odczytu przy poziomej ccii celowej*
g) przy poziomej osi celowej, pionowej osi obrotu instrumentu oraz poziomej osi libeli kolimacyjnej
Z tablic rozkładu chi-kwadrat odczytujemy wartość statystyki X odczytaną przy poziomie istotności a
img172 172 12. Metody grafowe12.2. Parsing dla gramatyki grafowej klasy ETL() Metodę tą zilustrujemy
img172 172 1 n*» yy»jRva *jr»# z-leńuośJ a - 1(0:;^ można
IMG172 172 172 i(t) - IB einwt , dla 0<Wt<3T -I Bino)t , dla JT-< U) t < 2T ZD Wartości
img172 172 Rys. 1.65. Charakterystyki sygnału cyfrowego: a) przebieg funkcji korelacji własnej, b) p
img172 172 12. Metody grafowe12.2. Parsing dla gramatyki grafowej klasy ETL() Metodę tą zilustrujemy
img172 172 1 n*» yy»jRva *jr»# z-leńuośJ a - 1(0:;^ można
img172 172 172 i(t) - IB einwt , dla 0<Wt<3T -I Bino)t , dla JT-< U) t < 2T ZD Wartości
IMG172 172 172 i(t) - IB einwt , dla 0<Wt<3T -I Bino)t , dla JT-< U) t < 2T ZD Wartości
img172 172 Rys. 1.65. Charakterystyki sygnału cyfrowego: a) przebieg funkcji korelacji własnej, b) p
img196 172 d) Inscenizacje - symulacje bez cech rywalizacji W przedmiotach humanistycznych przykłade
img196 172 d) Inscenizacje - symulacje bez cech rywalizacji W przedmiotach humanistycznych przykłade
img196 172 d) Inscenizacje - symulacje bez cech rywalizacji W przedmiotach humanistycznych przykłade
więcej podobnych podstron