Mechanika ogolna0013
20
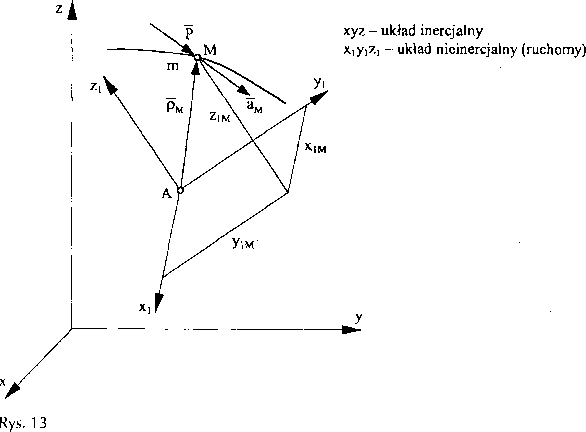
W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywaliśmy:
m-aM = P (63a)
n
gdzie: P = - geometryczna suma sił zewnętrznych działających na punkt
i=l
materialny, a aM - wektor przyspieszenia bezwzględnego.
Jeżeli opisujemy ruch punktu względem układu ruchomego, to interesuje nas przyspieszenie względne punktu. Z kinematyki ruchu złożonego punktu wiadomo, że w ruchu złożonym przyspieszenie bezwzględne jest to przyspieszenie określane względem układu nieruchomego. Jest ono sumą trzech składników, z których pierwszy oznacza przyspieszenie unoszenia, drugi przyspieszenie względne (określone względem układu ruchomego), a trzeci oznacza przyspieszenie Coriolisa:
(63b)
((A)
M “ aMu + aMw + aMcor ~ aMb
Podstawiając zależność (63b) do równania (63a), otrzymamy: m-«MH V 1 ( '"-“mJ 1 (' )
Równanie wektorowe (64) opisuje ruch masy w układzie ruchomym xiy-iZi.
W prowadzamy następujące wektory:
Bu = -m • aMu - tzw. siła unoszenia; jest to siła bezwładności,
Bcor = -m ■ a Mcor - tzw. siła Coriolisa; jest to również siła bezwładności.
< o do wartości:
Bu = m • aMu,
Bcor — ^ ’ aMcor ■
< Matecznie równanie (64) możemy zapisać:
m-aMw =P + Bu+Bcor (65)
'/.r/.uUymy równanie (65) na osie XiyxZ\ układu ruchomego. Otrzymamy równania:
m-*1M =Px, +Bux,
(66)
1,1 ^IM = Py, +Buy, +Boory,
m'Z1M = PZ, +BuZl +Bco.,
Równania (66) to różniczkowe równania opisujące ruch masy względem układu 11 v i z i, czyli opisuj ące ruch względny masy.
leżeli np.
to równanie (65) przyjmie postać:
"1!W=P (67)
Wówczas ruch masy w układzie ruchomym lub nieruchomym opisują te same lównnnia.
h/ykłud 7
lliyla pierwsza (rys. 14) obraca się ze stałą prędkością kątową coi wokół nieruchomej osi z. W rowku bryły 1, który nacięto promieniowo, może poruszać się punki. ()pisać zjawisko ruchu bryły 2 względem I. Opory ruchu pominąć.
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
image001 ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnych XOY trakt
Wprowadzenie DYNAMIKA jest działem mechaniki opisującym ruch układu materialnego pod wpływem si
Zadania fizyka Sitko 1. Ruch punktu materialnego opisują równania: x=At, y=Bt-Ct2
Mechanika ogolna0010 20 m(rM-cp + 2fM-(p) = £pi(p=:-P-sin(p (43) i=l Ponieważ rM =
Rozdział 2Kinematyka Definicja 3 Kinematyka jest to dział mechaniki opisujący ruch punktu lut) bryły
image002 (15) ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnych XOY
64500 image002 (15) ■ Opis ruchu w układzie współrzędnych XOY. Opisując ruch w układzie współrzędnyc
więcej podobnych podstron