Mechanika ogolna0005
10
Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z drugiej zasady Newtona, czyli:
m-aM=W = £Pi (8)
i=l
gdzie aM - wektor przyspieszenia punktu M.
Wiadomo, że wektory występujące w równaniu (8) można zapisać analitycznie w postaci:
aM=*M-i+yM- j+żM-k) p=pxT+py-j+pz-k j
Równanie (8) rzutujemy na osie układu odniesienia i otrzymujemy wówczas:
=PX
i=l
n
(10)
i=l
n
m-żM =Pz=]Tpi2
i=l
Równania (10) to tzw. różniczkowe równania ruchu masy, nazywamy je również dynamicznymi równaniami ruchu punktu o masie m, Równania Ir slanowią podstawą opisu zjawiska ruchu punktu materialnego. Siły działające na punkt materialny mogą zależeć od położenia punktu materialnego, czyli wektora 7M , prędkości vM lub czasu t, co można zapisać w postaci zależności:
(11)
P = P(rM.VM»t)
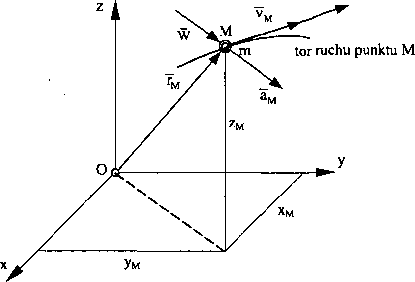
gdzie: rM - promień wektor opisujący położenie punktu materialnego względem przyjętego układu odniesienia; można go analitycznie zapisać w postaci:
rM = xM-i+yM- j+zM-k,
vM- prędkość punktu materialnego, co można również zapisać w postaci analitycznej:
VM=VMx-i+VMy-j+VM2-k,
t - czas.
Uzi iłując zależność (11) na osie układu współrzędnych, dostaniemy prawe strony układu równań (10), które będą zapisane jako:
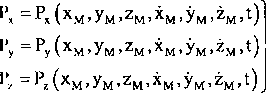
(12)
ni znaczy, że równania (10) mogą sprawiać kłopoty matematyczne przy szuka-mu ich rozwiązania.
I'miicważ równania różniczkowe muszą być poprawnie ułożone, należy postępować w następującej kolejności: a) przyjąć układ odniesienia xyz,
h) zaznaczyć na rysunku wszystkie siły działające na punkt materialny (co wynika zawsze z treści zadania), a także, w którą stronę wzglądem danej osi przemieszcza się punkt materialny, o) ułożyć równania (10) wg zasady: lewe strony równań zapisujemy jako symbol, prawe strony natomiast rozpisujemy - siły powodujące założony ruch dają rzuty dodatnie na osie, siły przeszkadzające w ruchu dają rzuty ujemne na osie.
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Mechanika ogolna0013 20 W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywal
Mechanika ogolna0046 M S;
Zadania fizyka Sitko 1. Ruch punktu materialnego opisują równania: x=At, y=Bt-Ct2
Mechanika ogolna0019 38 Równania (79) to rzuty wektora pędu środka masy na poszczególne osie układu
Mechanika ogolna0089 Powyższe równanie zapisujemy w postaci: Jest to układ dwóch równań różniczkowyc
Rozdział 2Kinematyka Definicja 3 Kinematyka jest to dział mechaniki opisujący ruch punktu lut) bryły
mechanika ogolna _______ISTATYKA1. Rachunek wektorowy, suma geometryczna sił, moment siły względem p
więcej podobnych podstron