Mechanika ogolna0019

38
Równania (79) to rzuty wektora pędu środka masy na poszczególne osie układu odniesienia.
Wektor pędu środka masy układu pokazany na rys. 19 można zapisać jako:
Qs =Qsx'i + Psy • J + Qsz(80)
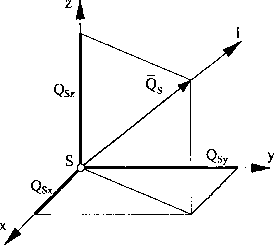
Wartość wektora pędu środka masy wyznaczymy wówczas ze wzoru:
QS = >/<&+<&+<& (81)
gdzie rzuty wektora pędu na poszczególne osie będą następujące:
n
Qsx
i=l
n
(82)

S
Qsy=m-ys=Zmi-yi *
i=i
n
Qsz=m-ŻS=Zmi‘Żi
i=l
W układzie SI jednostką pędu jest
2.4. Równanie ruchu środka masy układu
/lóżniczkujmy równanie (78) względem czasu. Otrzymujemy:
"1 -VS 'Vi-
W tównaniu tym -ł _ , co pozwala zapisać je w postaci: v, = a;
n
m ■ as =^m; -a; (83)
i=l
htiiicważ równanie (74) określa, że nij - aj =Pj +Ę, to po wstawieniu tego do w/ni u (83) dostaniemy:
'"■i‘s=Żmi-ai=ZPi+ŻFi '
i=l i=l i=l
ii _
Wiklm Xpi jest sumą sił wewnętrznych układu (wzajemnego oddziaływania
i i
(tiMiK Ii'»w materialnych), która wynosi zero. Równanie powyższe będzie miało
"i ■i's=£mi-ai=£pi (84)
i=l i=l
/iili /imść (84) to równanie wektorowe opisujące zjawisko ruchu środka masy illdmlii. Wynika z niego, że ruch środka masy całego układu mogą powodować lyllm nily zewnętrzne układu. Siły wewnętrzne mogą zmienić ruch środka masy lytlin części układu, ale nie całości.
M/nlii|i|e wzór (84) na osie układu odniesienia, mamy:
"l y.; -Yi = XPiy •
'»X'v*. X1’.-
(85)
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0074 V <>ó Rys. 88 Redukujemy układ sił bezwładności do środka masy układu i m
Mechanika ogolna0074 V 1 U, x Rys. 88 Redukujemy układ sił bezwładności do środka masy układu i mamy
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Mechanika ogolna0009 (38) IX m-aMr=£Pir n m-aM<p =ZPi9 i=l Ponieważ aMr -rm -cp2 jest to wartość
Mechanika ogolna0023 46 n n _ y M0 (W,) = y f ij x Ę) to geometryczna suma wekto
Mechanika ogolna0089 Powyższe równanie zapisujemy w postaci: Jest to układ dwóch równań różniczkowyc
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
więcej podobnych podstron