Mechanika ogolna0010
20
m(rM-cp + 2fM-(p) = £pi(p=:-P-sin(p (43)
i=l
Ponieważ rM = 1, to rM ~ % _ 0 > m = P/g. Otrzymamy dynamiczne równania
ruchu:
(44)
—l-<p = P-cos(p-N g
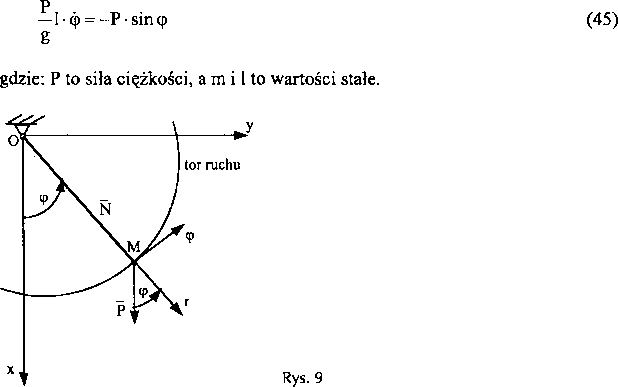
Z równania (45) możemy określić, jak zmienia się kąt 9 w czasie. Rozwiązanie tego równania jest znane wówczas, gdy kąt 9 jest mały. Wtedy sin 9 » 9 i równanie (45) przyjmie postać:
1 ■ 9 + g ■ 9 = 0 (46)
a stąd:
9 + ©o -9 = 0 (47)
gdzie — •—.

Rozwiązanie równania (47) będzie następujące:
<p = Cj • cos co0 • t + C2 • sin oo0 • t (48)
(j) = -Cj ■ co0 ■ sinco0 • t + C2 • co0 • cosco0 ■ t (49)
Sinic całkowania Cj i C2 wyznaczymy z równań (48) i (49), znając warunki po-r/.;|lkowe, np.:
ill:i t = t0 = 0 s, cp = tp0, (p = <p0 = 0.
Wprowadzając warunki początkowe do równań (48) i (49), dostaniemy:
Ci = cpo,
C2 = 0,
r/.yli ostatecznie otrzymamy:
<p = cp0 -cosg)0 • t = (p0 -cos
Wówczas z równania (44) określimy wartość siły napięcia liny:
P ,
N=P-cosq) 1 - cp =P
g
coscp
g\l
cosę-Jycpo-smyjt
I .(>. Zasada d'Alamberta
Równanie ruchu dla dowolnego punktu o masie m poruszającego się po torze (tys 10) ma postać:
m-aM=W,
_ 11 _
(jil/K* W P == ^ Pj - wypadkowa sił działających na punkt.
M
rwiiii lównaniu ruchu możemy nadać prostszą postać, przenosząc wszystkie wyiirzy mi jedną stronę. Otrzymamy wówczas:
P l ( m ■ iiM) 0 (50)
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0013 20 W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywal
Mechanika ogolna0009 IX m-aMr=ZPir i=1 (38) nm>aM<p=2X i=l Ponieważ aMr = rM
Mechanika ogolna0029 58 (116)m-*S=XPix i=lm-ys=ŻPiy i=l m‘Zs = ŻPiZ i=l Są to różniczkowe równania r
Mechanika ogolna0090 1 , 1 , -ni g Xs +-k, ■ x„ 4k2 -xj; Z geometrii układu wiemy, że: xu = 1 • sin
Mechanika ogolna0009 (38) IX m-aMr=£Pir n m-aM<p =ZPi9 i=l Ponieważ aMr -rm -cp2 jest to wartość
Mechanika ogolna0069 138Przykład 20 Określić siły reakcji więzów belki pokazanej na rys. 80. Belka w
Mechanika ogolna0071 142 •f 142 •f Rys. 85 Długość odcinka CC2 = AC2 • sin a = 2 • 1 • sin a, 5rc =
Mechanika ogolna0080 160 Współrzędne punktu B będą następujące: xB =lj -cos(p + l2 COSV
więcej podobnych podstron