Mechanika ogolna0029
58
(116)
m-*S=XPix
i=l
m-ys=ŻPiy
i=l
m‘Zs = ŻPiZ
i=l
Są to różniczkowe równania ruchu postępowego bryły, czyli dynamiczne równania ruchu postępowego bryły.
3.2. Ruch obrotowy bryły
3.2.1. Dynamika ruchu obrotowego bryły
Kuch obrotowy bryły będzie jednoznacznie określony, jeżeli znamy kąt obrotu (rys. 30), prędkość kątową i przyspieszenie kątowe.
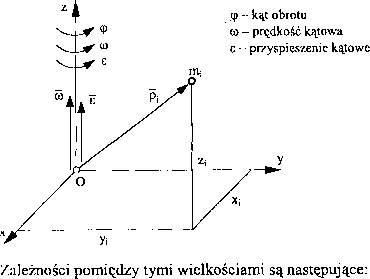
[e = ó) = ćp.
Prędkość i-tego punktu możemy wyrazić jako:
|
i |
j |
k | |
|
V, (>> X P, |
0 |
0 |
w |
|
■'i |
V| |
K/uly wektora prędkości na poszczególne osie zapisujemy: vix =X; =-©-Yi I
V|y = Yi =co-x; [• (117)
V; = Ż; = 0
Mówinmia (117) to tzw. kinematyczne formuły Eulera. Różniczkując je, dostaliśmy rzuty przyspieszenia na poszczególne osie:
(118)
;ljx=x. =-£.y. _co2.Xi iiiy=yi=E-xi-G)2-yi
n iy. = = 0
(iKicślamy wektor krętu bryły jako układu punktów względem bieguna O, czyli: K„=KXJ + Ky-j+Kz-k,
gd/ir rzuty wektora krętu określamy tak jak dla układu punktów materialnych, ii więc:
=Zmi(yi-żi-zi-yi)=-“-Żmi-xi-zi=-IxZ-co>
K y ~xi •żi)=c°-Żmi -zi=_IyZ •“>
K/.=Żmi(xi-yi-yi-xi)=®-Żmi(xi +y.2)=V®-
/tilrżności te zapiszemy dalej w postaci:
K x = -Ixz • w'
(119)
lś=-Iyz-ft)’
KZ=IZ-co
Kównania (119) opisują kręt bryły względem odpowiednich osi układu odnie-Mirma. Jeżeli oś z jest główną osią bezwładności, to Ixz = lyz = 0, czyli:
Kx 0 Kv 0 K, I, ■«»
(120)
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0020 40 Są to różniczkowe równania ruchu środka masy układu, czyli dynamiczne równan
Mechanika ogolna0020 40 Są to różniczkowe równania ruchu środka masy układu, czyli dynamiczne równan
Mechanika ogolna0006 12 d) dokładnie podać informacje (12), czyli o tym, jakimi fu
Mechanika ogólna0006 12 d) dokładnie podać informacje (12), czyli o tym, jakimi fu
Mechanika ogólna0006 12 d) dokładnie podać informacje (12), czyli o tym, jakimi fu
prydynol, benzodiazepiny, yS-adrenolityki oraz antagonistów wapnia. Są to preparaty z różnych grup,
Mechanika ogolna0012 24 n 2X=o^g-t-b = o (59) i=l n £piy=0->N-P = 0 (60) i=l Po podstawieniu zale
Mechanika ogolna0079 I le/lm Nlopm swobody: s T.l I 5. I Iklad posiada pięć stopni swobody.Przykład
Mechanika ogólna0079 I le/lm Nlopm swobody: s T.l I 5. I Iklad posiada pięć stopni swobody.Przykład
Mechanika ogólna0079 I le/lm Nlopm swobody: s T.l I 5. I Iklad posiada pięć stopni swobody.Przykład
więcej podobnych podstron