Mechanika ogolna0079
I le/lm Nlopm swobody: s T.l I 5.
I Iklad posiada pięć stopni swobody.
Przykład 25
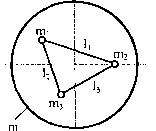
Rozpatrujemy bryłę sztywną. Obierzmy trzy dowolne punkty mj, m2, m3 należące do bryły, nieleżące na jednej prostej (rys. 98). Taki układ trzech punktów modeluje bryłę sztywną.
Rys. 98
Ponieważ bryła jest sztywna, to odległości h, 12, 13 między punktami są stałe. Równania więzów dla bryły:
Fi =(xi ~x2)2 +(y> -y2)2 +(z. -z2)2 -1? =°> f2 =(xi -x3)2 +(yi -y3)2 +(zi -z3)2 -i2 =0, f3 ~~(x2 X3)2 +(y2-y3)2 +(z2-Z3)2-i3 =0.
Mamy trzy punkty należące do bryły, trzy równania więzów, liczba stopni swobody bryły wyniesie:
s = 3-3-3 = 6.
Uwaga!
Stopnie swobody to liczba niezależnych współrzędnych, które w sposób jednoznaczny opisują położenie układu. Każda z tych współrzędnych określa niezależny ruch.
5.4.2. Współrzędne uogólnione
Położenie układów punktów materialnych lub ciał sztywnych będzie jednoznacznie określone, jeżeli podamy współrzędne kartezjańskie wszystkich punk-
Ió\v Iwni/t|t<yt>h llklml Na iikliul imizueiimy więzy <>)'.iimi* zapień mch, czyli nai/iiciuiiy ugnmU/cniu im odpowiednio współrzędne. Wygodnie jcs| opisywać poliiżnnc iikludii za pomooii paitiinclrów, które są już między sobą niezależne Mog;| |o hyc wielkości zupełnie dowolne. Takie wielkości niezależne, wybrane w celu opisania położenia układu punktów lub ciał sztywnych, nazywamy współrzędnymi uogólnionymi.
Przykład 26
Opiszemy ruch wahadła matematycznego (rys. 99).
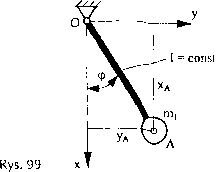
Równania parametryczne punktu A są następujące:
xA = 1 • cos tp = xA (cp), yA =l-sincp = yA(cp).
Obie te wielkości zależą od kąta obrotu cp, który jest wielkością niezależna Przyjmiemy więc, że: cp = qx — tzw. współrzędna uogólniona. Będziemy zatem mieli:
xa = XA (9l)>
yA = yA (<Ti )-Przykład 27
Dwie masy: mi i m2 zawieszono na nierozciągliwej nici, co pokazano na rys. 100.
Określimy współrzędne punktów charakterystycznych układu. Dla punktu A, w którym zawieszona jest masa ną, mamy:
xA =1, -coscp, yA =1, -skicp.
Wyszukiwarka
Podobne podstrony:
Mechanika ogólna0079 I le/lm Nlopm swobody: s T.l I 5. I Iklad posiada pięć stopni swobody.Przykład
Mechanika ogólna0079 I le/lm Nlopm swobody: s T.l I 5. I Iklad posiada pięć stopni swobody.Przykład
Mechanika Ogólna Wykład 1 pdf5 )łe rp r rr>ies%£uo / /c (<5L
Mechanika ogolna0003 6Pierwsza zasada Newtona Jeżeli na swobodny punkt materialny nie działają żadne
Mechanika ogolna0029 58 (116)m-*S=XPix i=lm-ys=ŻPiy i=l m‘Zs = ŻPiZ i=l Są to różniczkowe równania r
Mechanika ogolna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogolna0083 Z kinematyki ukliulu widzimy, że mdi wodzika nip wytRMMM WWtui kii
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogólna0083 Z kinematyki ukliulu widzimy, że mdi wodzika nip wytRMMM WWtui kii
Mechanika ogólna0083 Z kinematyki ukliulu widzimy, że mdi wodzika nip wytRMMM WWtui kii
Mechanika ogolna0081 H ( »w 1111111 i i (210) lo l/w. uogólnione przesunięciu wiiliinluo iiklmllL Jc
Mechanika ogolna0083 / kiiKMititlyki iiklmlii widzimy, że mdi wodzika nip wyntUflll fUiHw krążku. Uk
więcej podobnych podstron