Mechanika ogolna0081
Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl ich tyle, ild uklml posiada stopni swobody. l'orówuuji|c zależności (200) i (210), możemy zapisać:
ST; = k ■ vj.
W praktyce, aby określić równanie (209), postępujemy następująco: tnp^O, 8q2 =0 ... Sqs=0,
8q2^0, 8q, =0 ... 8qs=0,
itd., czyli: Sij = (8^)1 +(8^)2 + ... + (8q)s.
Przesunięcie wirtualne można zapisać:
(211)
5>i=i(8d,
j=i j=i oqj
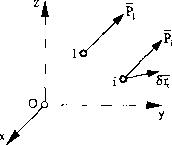
5.4.4. Siły uogólnione
Niech na układ o s stopniach swobody działa układ sił (rys. 102).
Jeżeli 8qt ^ 0, 8q2 =... = 8qs = 0 (q2,q3...qs = const. - to wartości stałe), praca przygotowana w przypadku pierwszej współrzędnej uogólnionej (wtedy układ ma 1 stopień swobody) będzie:
SI, i- (ftł,), +1>2(Srj), +...+P„(8f,), =£p,(8i;), =ŻP,fŁ5q, =
i=i i=i ocłi
-Q,-5qi.
dla drugiej współrzędnej uogólnionej: 8q2 ^0, 5qt = 8q3 = ... = 8qs =0, praca przygotowana:
81-, = P, (Sf;), + P, (5r,)2 +...+ P„ (8Ę,), = £p, (5^ = £P, =
i=l i=l 0(l2
= Q2 -8q2.
Postępując tak z każdą wspjółrzędną uogólnioną, dojdziemy do ostatniej:
8qs*0,
Sq: = 8q3 = = 8qs_j =0,
SLs = P, (6ij)s + P, (Sr,)s + ... + P„ (6r„)s = £p, (St;)s = £p, JŁ&u =
i=l i=l 0Cłs
= Qs ‘ ^s-
Z powyższych zależności określimy wielkości: (212)
U 5qs
Równania (212) to tzw. siły uogólnione. Jest ich tyle, ile układ posiada stopni swobody.
Uwaga!
Siły uogólnione zastępują działanie tych wszystkich sił występujących w układzie, które wykonują pracę wirtualną.
Wyszukiwarka
Podobne podstrony:
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogolna0081 H ( »w 1111111 i i (210) lo l/w. uogólnione przesunięciu wiiliinluo iiklmllL Jc
56917 P1020665 (3) Taka więc całka ogólna równana niejednorodnego w przypadku, gdy
Mechanika ogolna0037 74 ożyli: 1: Ri <Pi -2-yB = 2-r2 -q>2, q -<p, = uc. Różniczkując powy
Mechanika ogolna0046 M S;
Mechanika ogolna0077 <S
Mechanika ogolna0084 fł.4.(». Pole
więcej podobnych podstron