Mechanika ogolna0084
fł.4.(». Pole |Milem J(ilne
Jeżeli w naszym układzie pracę wykonują tylko siły pola potencjalnego, lo wówczas zapiszemy, że potencjał jest funkcją współrzędnych uogólnionych, czyli:
(21 S)
V = V(q1,q2...qs)
Określając pochodne cząstkowe potencjału V, opierając się na współrzędnych uogólnionych, dostaniemy:
av
5q,
Qi =“
q2 =
(2U»)
QS
av
3qs
Z równania tego wynika, że uogólnione cząstkowe pochodne względem odpowiednich współrzędnych uogólnionych określają siłę uogólnioną.
Przykład 30
Dla układu płaskiego pokazanego na rys. 105 określić siły uogólnione.
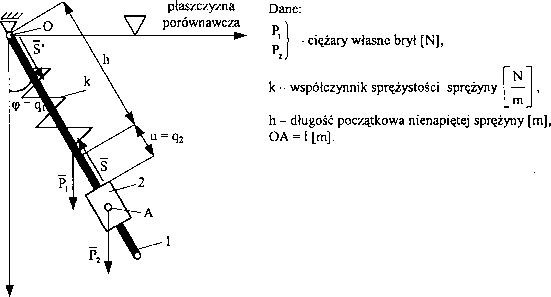
Rys. 105
Wahadło może się obracać wokół punktu O, suwak 2 może przemieszczać się po wahadle. IJklad posiada więc dwa stopnie swobody. Przyjmijmy pierwszą współrzędną uogólnioną: kąt obrotu bryły 1 (qi = ęp), drugą współrzędną: przemieszczenie wodzika 2 względem 1 (q2 = u). Potencjał układu jest równy sumie potencjału grawitacyjnego i sprężystego:
V(q1,q2)-
V = -mj -g-^-cos(p-m2 -g(h + u)cos(p + ^-k-u1
Zgodnie z równaniem (213) siły uogólnione wynoszą:
„ dV 1 . /, \ .
Qi =-— = -111, -g—•sin(p-m2 -g^h + ujsincp,
n dV .
Q2 =--= m2 • g • coscp -k• u,
du
Szukamy położenia równowagi statycznej układu. Równowaga ta wystąpi wówczas, gdy spełnione jest równanie (211), tzn.:
Qi =-m! -g—sin(p0 -m2 -g(h + u0)sincp0 =0, Q2 =m2 - g-cosepo -k-u0 =0,
gdzie: (p0 - kąt, przy którym występuje równowaga statyczna,
u0 - statyczna deformacja sprężyny (odkształcenie sprężyny w położeniu statycznym),
ną-g = Pi - siła ciężkości bryły 1, m2-g = P2 - siła ciężkości bryły 2.
Uwzględniając powyższe zależności, zapiszemy, że:
Pi_ + P2(h + Uo)
sincp0 =0,
P2-coscpo-k-u0 =0.
Równanie (1) jest spełnione, gdy sincp0 = 0, czyli: cp0 = 0,7t, 2 ■ n,.... Aby ustalić, które rozwiązanie jest prawdziwe, wykorzystajmy twierdzenie mówiące, że położenie równowagi w polu potencjalnym jest tam, gdzie potencjał osiąga minimum, czyli:
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0016 32 gania są takie same. Ze względu na małą wartość siły unoszenia przyjmujemy,
Mechanika ogolna0003 6Pierwsza zasada Newtona Jeżeli na swobodny punkt materialny nie działają żadne
Mechanika ogolna0053 m, ix(p,). M i=l natomiast da, dp, dy to dane kąty obrotu elementarnego wokół o
Mechanika ogolna0060 120 120 powierzchnia ekwipotencjalna powierzchnia ekwipotencj alna Rys. 69 Aby
Mechanika ogólna0060 120 120 powierzchnia ekwipotencjalna powierzchnia ekwipotencj alna Rys. 69 Aby
Mechanika ogólna0060 120 120 powierzchnia ekwipotencjalna powierzchnia ekwipotencj alna Rys. 69 Aby
mechanika ogolna�1 Zadanie 7 Wyznacz momenty sił Ph P2 i P3 względem punktów 0, A i B, jeżeli dane s
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0051 Wit-IktiŃć okivŃlum
Mechanika ogolna0057 114 linergia całkowita układu wynosi więc: En=^(P,+3-P2 + 2P3). 4g lilcmentama
więcej podobnych podstron