Mechanika ogolna0081
H ('»w 1111111 i i (210) lo l/w. uogólnione przesunięciu wiiliinluo iiklmllL JcnI leli (ylc, ile uklml posiada stopni swobody. l'orówiiuji|c zależności (200) i (210), możemy zapisać:
ST; -- k ■ V|.
W praktyce, aby określić równanie (209), postąpujemy następująco:
Stp^O, 8q2 =0 ... Sqs:=0,
w-fh"
8q2*0, 8q,=0 ... 8qs=0,
iul., czyli: 8^ = (SĘ), +(5^ +... + (5Ę)S.
Przesunięcie wirtualne można zapisać:
(Sm
j=i j=i
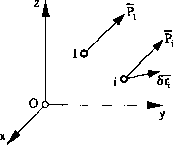
Niech na układ o s stopniach swobody działa układ sił (rys. 102).
Jeżeli 8qt ^ 0, Sq2 =... = 8qs = 0 (q2,q3-.qs = const. - to wartości stałe), praca przygotowana w przypadku pierwszej współrzędnej uogólnionej (wtedy układ ma 1 stopień swobody) będzie:
SI., I* («.;), +1*2(572), +...+P„(8f„), =ip,(5ri), =ŻP,|?-5q, =
i=l i=l acll
illa drugiej współrzędnej uogólnionej: 8q2 * 0, 5qj =8q3 = ... = 8qs =0, praca przygotowana:
51.2 = P,(S^)a + ^2(^2)2 + —+ P„(^)2 “ŚP.tĄ = !?, J^ą, =
i=l i=l Wh
= Q2-5q2.
Postępując tak z każdą współrzędną uogólnioną, dojdziemy do ostatniej:
8LS = P, (5ij)s + P2 (5F,)S +...+Pn (5f„)s = £?, (61;)s = £P, ^-5.,, =
i=l i=l °4s
=Qs-8qs-
Z powyższych zależności określimy wielkości:
Qi-Pf
ti 3q,
(212)
0>=Pf
Qs=ŻPi“
Równania (212) to tzw. siły uogólnione. Jest ich tyle, ile układ posiada stopni swobody.
Uwaga!
Siły uogólnione zastępują działanie tych wszystkich sił występujący eh w układzie, które wykonują pracę wirtualną.
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogólna0081 Uiiwiiiiiiiii (210) lo l/w, uogólniono pi zesunięciu wiilualiie tikImlu. Jcsl i
Mechanika ogolna0066 132 gdzie: 57 - tzw. wektor przesunięcia przygotowanego (albo wirtualnego), v -
Mechanika ogolna0046 M S;
Mechanika ogolna0084 fł.4.(». Pole
mechanika ogolna�5 Zadanie 2 Sztywna, nieważka belka BC zamocowana jest na podporze nieprzesuwnej A
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0051 Wit-IktiŃć okivŃlum
Mechanika ogolna0057 114 linergia całkowita układu wynosi więc: En=^(P,+3-P2 + 2P3). 4g lilcmentama
więcej podobnych podstron