Mechanika ogolna0009
IX
m-aMr=ZPir
i=1 (38)
n
m>aM<p=2X
i=l
Ponieważ aMr = rM — rm -tp2 jest to wartość przyspieszenia radialnego, natomiast aM(p = rM • (p + 2rm ■ <p to wartości przyspieszenia transwersalnego, wówczas dynamiczne równania ruchu masy w układzie współrzędnych biegunowych będą równe:
m(rM-rnT<i>2) = 2X
(39)
i=l
n
m(rM ■ (p + 2fm ■ cp) = ^Pip
Jeżeli opisujemy ruch masy w naturalnym układzie odniesienia, to rzutując równanie (8) na oś styczną x i normalną n, dostaniemy:
m‘aMT=2X
(40)
1=4
n
m-aMn=ZPin
Jeśli wartość przyspieszenia stycznego aMt = rM ■ ćp i przyspieszenia normalnego v2 .
aMn jest znana, wówczas dynamiczne równania ruchu masy w układzie Pm
współrzędnych naturalnych t i n wynoszą:
m(rM-9) = £Pk
i=l
n
m
,Pm j
Przykład 4
Punkt o masie m przemieszcza się po torze kołowym. Określić, ile wynosi siła imcisku podłoża w położeniu pokazanym na rys. 8, jeżeli wiadomo, że znamy |cj’,o prędkość V i promień krzywizny toru R.
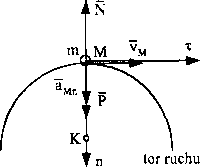
Rys. 8
Dane:
P - siła ciężkości [N],
R = K M - promień krzywizny toru [m], v - prędkość masy [m/s], przyspieszenie normalne masy:
a
Mn R R
I )ymimiczne równanie ruchu na kierunku osi normalnej n będzie mieć postać:
m-aMn =ZPin =P“N>
■il:|il mamy:
N = P - m ■ aMn = p ■
p
Vr-v2>
s gR >
/ tego wynika, że jeżeli g-R - V2 = 0, czyli gdy prędkość masy v > yJg-R , wów-i zas w pokazanym na rys. 8 położeniu masa oderwie się od powierzchni, bo wówczas N < 0. Aby do oderwania nie doszło, prędkość masy w tym punkcie powinna być następująca:
V<yjg-R .
Przykład 5
Masa zawieszona na nierozciągliwej linie przemieszcza się w płaszczyźnie xy (i ys. 9). Opisać ruch masy.
Kuch masy odbywa się w płaszczyźnie xy. Ruch ten możemy opisać, przyjmując np. układ współrzędnych biegunowych r i (p. Dynamiczne równania ruchu masy hędi| wygli|diić naslępupii o:
m(VM 'mV) I]'
’M — P ■ cos ip N
(42)
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0009 (38) IX m-aMr=£Pir n m-aM<p =ZPi9 i=l Ponieważ aMr -rm -cp2 jest to wartość
Mechanika ogolna0053 m, ix(p,). M i=l natomiast da, dp, dy to dane kąty obrotu elementarnego wokół o
Mechanika ogolna0032 M.5.2.2. Reakcje dynamiczne w łożyskach Wyobraźmy sobie ciało sztywne osadzone
img050 (38) Martwica tkanki tłuszczowej(,necrosis adiposa Balser, ) Martwica (necr
Mechanika ogolna0011 22 Oznaczmy odpowiednio: B = -m • aM - tzw. siła bezwładności (siła fikcyjna) &
Mechanika ogolna0013 20 W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywal
Mechanika ogolna0019 38 Równania (79) to rzuty wektora pędu środka masy na poszczególne osie układu
więcej podobnych podstron