Mechanika ogolna0090
1 , 1 ,
-ni'g'Xs +-k, ■ x„ 4k2 -xj;
Z geometrii układu wiemy, że: xu = 1 • sin tp = 1 - cp,
1 . 1 x^ = — • sm cp =—cp, s 2 2
1 . 1
xn- — •sm(p =—cp. o 3 3V
Tak więc potencjał układu w funkcji współrzędnej uogólnionej wynosi:
V = -—P-l-cp +—k, -l2 -cp2 +—k2 -l2 -cp2.
2 2 1 18 2
Zgodnie ze wzorem (219) potencjał kinetyczny rozpatrywanego układu:
L = E - V =—l2 • (p2 + -P • 1 • cp --k, • l2 • (p2 -—k2 • l2 • (p2 = L(cp, tp).
6g 2 2 1 18 2 v '
Określimy wielkości występujące w zależności (220):
— = -P-l-krl2-cp--k2-l2-<p,
Sep 2 1 V 9 2
dL P 2 .
— =—1 -cp,
Sep 3g

dYsiA
dt^Scp,
Równanie opisujące zjawisko ruchu układu będzie następujące:
—I2 -tp + fk, + Av ]l2-cp = i-P-l.
3g l 1 9 2J A2
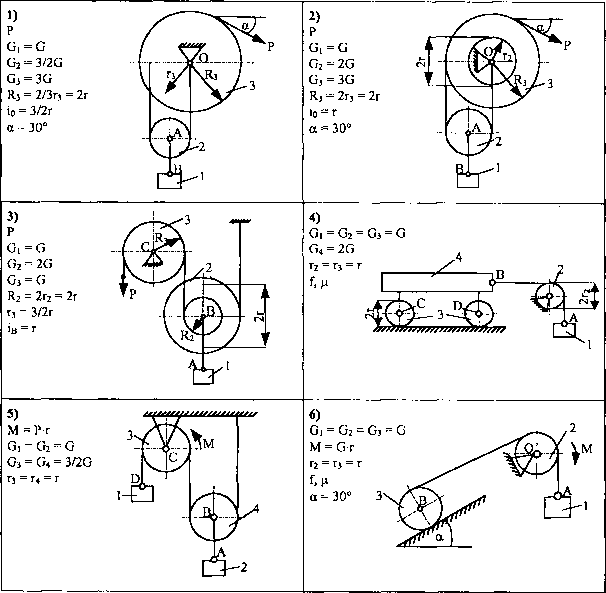
TEMAT 10
Opisać ruch mechanizmów płaskich, których schematy pokazano na zamieszczonych rysunkach, podając równania Lagrange’a drugiego rodzaju. Znane są ciężary własne ponumerowanych brył, wartość momentów, geometria układu. Przyjąć zerowe warunki początkowe, promienie bezwładności, współczynniki tarcia suchego i oporu toczenia. Otrzymane dynamicznie równania ruchu rozwiązać tak, aby określić, jak w czasie zmieniają się współrzędne uogólnione.
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0061 122 Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał n
Mechanika ogolna0071 142 •f 142 •f Rys. 85 Długość odcinka CC2 = AC2 • sin a = 2 • 1 • sin a, 5rc =
Mechanika ogolna0076 191 moment główny sil bezwładności: Ha = -IA • e, (zakładamy, że e! jest znane)
Mechanika ogólna0061 122 Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał n
Mechanika ogólna0061 122 Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał n
Mechanika ogolna0023 46 n n _ y M0 (W,) = y f ij x Ę) to geometryczna suma wekto
Mechanika ogolna0025 50 z x układ punktów materialnych, np. żyroskop Rys. 232.7. Geometria mas2.7.1.
Mechanika ogolna0044 HK HK Rys. 43 /.r.oilnie z twierdzeniem Resala mamy:Rn = K„ =Mn czyli oś z wych
Mechanika ogolna0047 •M v:’ = xz +y2 + żz, energia kinetyczna wyrazi się wówczas: li=
więcej podobnych podstron