Mechanika ogolna0061
122
Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał na tej płaszczyźnie jest zerowy. Praca sił pola potencjalnego przy przejściu z punktu A do B będzie wynosić:
LAB =VA -VB =m-g'ZA =m-g(ZA-ZB) = m-g-h = m-g'ZA-
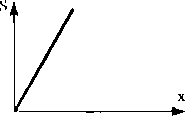
Pole potencjalne sprężyny - siła reakcji sprężyny zależy od deformacji sprężyny. Jeżeli założymy liniową zmianę siły reakcji sprężyny, to jej wartość będzie następująca:
S = k-x[N],
gdzie: k- tzw. współczynnik sprężystości, wyznaczany na drodze doświad-
N
czalnej
x - zmiana długości sprężyny w porównaniu z długością początkową sprężyny, czyli deformacja sprężyny [m].
Zakładamy, że ściskamy sprężynę o x, jak pokazano na rys. 71.
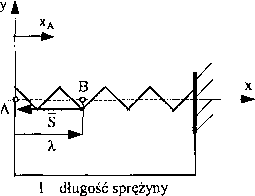
Rys. 71
Zgodnie z rys. 71 siła reakcji sprężyny daje rzuty na osie:
Px = -S = -k • x,
l’v 0,
I- 0.
Ponieważ równania (188) są spełnione, to szukamy potencjału pola sprężyny z zależności:

j*5V = Jk • x ■ dx, czyli:
V =—k-x2 +G
2
Wyznaczymy stałą całkowania. Zakładamy, że gdy x = 0, V = 0, czyli C = 0. Ostatecznie potencjał pola sprężyny określimy jako:
V = ^k-x2 (191)
1 2
Jeżeli V = —k■ x =const.,to x-±const. - mamy równanie powierzchni ekwipotencj alnej.
Praca sił pola potencjalnego sprężyny przy przejściu z punktu A do B będzie wynosić:
Lab = VA -VB = |k-xi -|k-x2 =ik(x^ -x2 ) = -ik-x2 = ~k-Z2
(192)
gdzie X - wartość bezwzględna zmiany długości sprężyny.
Równowaga w polu potencjalnym
Jeżeli w polu potencjalnym punkt materialny ma pozostać w równowadze statycznej, to oczywiście siła działająca w tym punkcie jest zerem, czyli Px, Py i Pz = 0. Wtedy z równań (186) wynika, że:
= 0, jest to równanie dodatkowe w tych punktach, gdzie
występują minima lub maksima potencjału. Punkt, w którym występują ekstremu potencjału to jego położenia równowagi statycznej.
W polu potencjalnym punkt, w którym potencjał osiąga minimum jest położeniem równowagi stałej, jest to tzw. twierdzenie Dirichlcln.
Wyszukiwarka
Podobne podstrony:
Mechanika ogólna0061 122 Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał n
Mechanika ogólna0061 122 Płaszczyzna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał n
Mechanika ogolna0061 122 1’łaszczy zna xy jest tzw. płaszczyzną porównawczą. Zakładamy, że potencjał
Mechanika ogolna0076 191 moment główny sil bezwładności: Ha = -IA • e, (zakładamy, że e! jest znane)
Mechanika ogolna0042 X4 Wzór (149) jest to tzw. twierdzenie Resala, opisujące ruch kulisty będący pr
Mechanika ogolna0011 22 Oznaczmy odpowiednio: B = -m • aM - tzw. siła bezwładności (siła fikcyjna) &
Mechanika ogolna0052 Rys. 57 Wyrażenie i; x P; jest momentem siły Pj względem punktu O, co zapisze
Mechanika ogolna0082 Przykład 2H Dany jest mechanizm plaski pokazany na rys. 101. Ntt bryłę I uipclu
więcej podobnych podstron