Mechanika ogolna0082
Przykład 2H
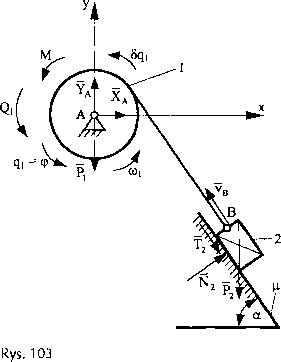
Dany jest mechanizm plaski pokazany na rys. 101. Ntt bryłę I uipclumizmu na wijana jest lina, do której końca przymocowano bloczek (bryki 2) poruszający się ruchem postępowym po płaskiej i chropowatej równi o współczynniku tarcia p. Na krążek 1 działa para sił M. Określmy siłę uogólnioną układu, uwzględniając ciężary własne brył, siły tarcia na równi i zadany moment M.
Dane:
M [N-m],
- ciężary własne brył [N].
Omawiany układ posiada jeden stopień swobody. Przyjmijmy za współrzędną uogólnioną kąt obrotu krążka:
qi=<Pi-
Przemieszczenie uogólnione będzie więc: 8qi. Praca wirtualna układu jest równa sumie prac wirtualnych wykonanych przez siły działające na poszczególne bryły, i tak:
Qr8q5=8L(I)+8L(2).
Bryła 1 jest w ruchu obrotowym, bryła 2 w ruchu postępowym, będzie więc:
Oli po mwyltjilnmnlll Nl! wykoiiii|i|i'ydi pmcę daje: (.), rt«|j P, (sin<x-l-|.i-cosa)5'Ęj.
Układ po,siada jeden stopień swobody. Zależności pomiędzy uogólnionymi przemieszczeniami poszczególnych brył są następujące:
8rB=ri-8(p1=r-Sq1,
pracę wirtualną zapiszemy więc w postaci:

Jeżeli teraz to równanie podzielimy obustronnie przez Sqb to otrzymamy w;u tość siły uogólnionej układu:
Q, =M-P2 -r(sma + p-cosa).
Przykład 29
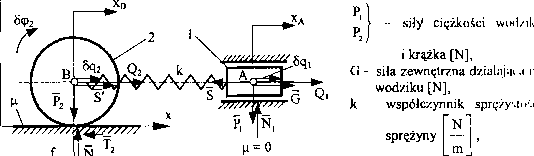
Wodzik o masie mi mogący poruszać się ruchem postępowym w prowadnicad połączono sprężyną o współczynniku k z krążkiem o masie m2. Krążek mo/< poruszać się ruchem płaskim po poziomej, chropowatej i odkształcalnej spręży ście płaszczyźnie. Na wodzik działa siła zewnętrzna G (rys. 104). Określić silj uogólnione tego układu.
Dane:
f N.
i krążka [N],
G - sita zewnętrzna działająca n wodziku [N],
k - współczynnik sprężyslo-n "N1
sprężyny — ,
[_m J
f- ramię tarcia toczenia (np. im cie toczenia) [m], p - współczynnik tarcia suclieyn
Rys. 104
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0082 1’r/ykł.ul 211 Dany jest mccliani/m plaski pokazany na rys. 101 Nu bryłę I meel
et rapezSTATYSTYKA OPISOWA - MIARY ŚREDNIE, PRZYKŁAD Przykład Poniżej dany jest rozkład zarobków w
Mechanika ogolna0056 112Przykład 15 Opisać zjawisko ruchu układu pokazanego na rys. 65, stosując zas
DSCN5041 Przykład skretnejr Dany jest rozkład Px(x),4 l.Gh uf- •45 Ul
24 luty 07 (105) Przykład 3.31 Dany jest model fizyczny układu napędowego maszyny wyciągowej w posta
24 luty 07 (58) Przykład 3.20 Dany jest wirnik o masie M obracający się wokół osi Oz z prędkością ką
Klasyfikacja pasożytów PASOŻYT PRZYKŁADY BEZWZGLĘDNY Pasożytnictwo jest konieczne do
DSC02043 (5) 1. Redukcja ryzyka Mechanizmy obronne ewoluowały na każdym etapie zmi
Ogólną tendencją w tym wypadku jest dążenie do ściślejszej integracji z gospodarkami krajów
img013 13 1. Wprowadzenie Rys. 1.3. Przykładem obiektu podlegającego rozpoznawaniu może być pokazany
DSC00205 (12) Przykład uproszczony poker Graja tylko asy i króle Na początku gracze wkładają do puli
84 O. Ciszakcy 2, a przykładowy raport z badań symulacyjnych pracy gniazda pokazano na rys. 5. Tabli
Strona0034 34 Przykład 2.4 Wyznaczymy częstość drgań własnych układu pokazanego na rys. 2.8, gdzie w
więcej podobnych podstron