Mechanika ogolna0044
HK
HK
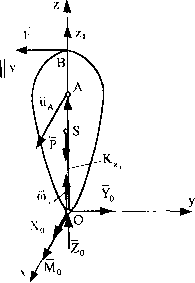
Rys. 43
/.r.oilnie z twierdzeniem Resala mamy:
Rn = K„ =Mn
czyli oś z wychyli siq w płaszczyźnie xz o kąt a, a z nią wychyli się w tej płaszczyźnie bąk, co pokazano na rys. 44, natomiast siła F znika.
Wówczas:
M0=OSxP,
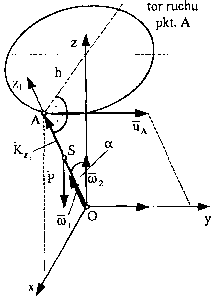
ro do wartości:
M0 =P OS- sin a,
K0 — — M0 — uA,
ua = a>2 -KZi - sina.
Porównując te wielkości ze sobą, otrzymujemy:
P • OS • sin a = co2 ■ KZj • sin a = IZj • cDj ■ co2 ■ sin a.
/. równania tego określimy prędkość kątową bąka wokół osi z:
OS _P_
lc:;l lo prędkość kątowa precesji bąka. Analizowany bąk jest żyroskopem, który |csl precesją regularną.
I Jw.iga!
W urządzeniach nawigacyjnych wykorzystuje się żyroskop, którego rozwiązanie konstrukcyjne pokazano schematycznie na rys. 45.
Na rysunku 45 oc>i = const., 1, 2, 3 - ramki. Osie obrotu tych ramek przecinają 'iu; w punkcie S, który jest środkiem masy krążka 4. Krążek 4 obraca się ze stałą piędkością kątową wokół własnej osi obrotu Z] łożyskowanej w ramce 1, oś Zj |c:;i główną centralną osią bezwładności krążka.
aku: rozwiązanie nazywane jest zawieszeniem Cardana. Pozwala ono na to, aby:
Ms =0,
czyli:
Ks - K = const.,
iu do wartości:
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0007 14 14 Rys. 6 Dane: P - siła ciężkości masy [N], x = X-t2 - przemieszczenie masy
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0024 48 więc po podstawieniu do wzoru (101) mamy: _
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0024 48 więc po podstawieniu do wzoru (101) mamy: __ n n ka =Z(vmi
Mechanika ogolna0010 20 m(rM-cp + 2fM-(p) = £pi(p=:-P-sin(p (43) i=l Ponieważ rM =
Mechanika ogolna0025 50 z x układ punktów materialnych, np. żyroskop Rys. 232.7. Geometria mas2.7.1.
Mechanika ogolna0030 60 Wektor K0 pokazano na rys. 31.ZA u K0 = Kz=Kzk y -► Rys. 31 Zmianę krętu bry
Mechanika ogolna0042 X4 Wzór (149) jest to tzw. twierdzenie Resala, opisujące ruch kulisty będący pr
Mechanika ogolna0043 X6 Na przykład na płynącym statku (rys. 42) prostopadle do płaszczyzny symetrii
więcej podobnych podstron