Mechanika ogolna0080
160
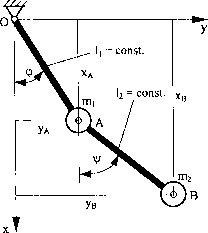
Współrzędne punktu B będą następujące:
xB =lj -cos(p + l2 COSV|/, yB =1[ -sin(p + l2 -siny.
Układ posiada dwa stopnie swobody, bo jego jednoznaczne opisanie wymaga podania cp i v|/. Są to kąty, czyli tzw. współrzędne uogólnione. Będą więc dwie współrzędne uogólnione:
qi=9.
q2 =¥•
Z pokazanych przykładów wynika, że współrzędne kartezjańskie są faktycznie współrzędnymi uogólnionymi, czyli jeżeli ruch układu opisują współrzędne uogólnione qb q2...qs, to wówczas (rys. 101):
^ = ^(qi»q2-qs)-

Rys. 101
1 (l 1
Uwaga!
Współrzędne uogólnione mogą być współrzędnymi kątowymi lub współ rzędnymi liniowymi:
qi, q2...qs- współrzędne uogólnione.
Różniczkując po czasie te wielkości, dostaniemy prędkości uogólnione, en oznaczymy:
q!,q2 ...qs - prędkości uogólnione.
Kolejne różniczkowanie daje nam: qI,q2...qs - przyspieszenie uogólnione.
5.4.3. Uogólnione przesunięcie wirtualne
Wektor promień opisujący położenie punktu wyrażamy w funkcji współrzęd nych uogólnionych:
(20S)
^fai.Ms)
Równanie (208) różniczkujemy względem czasu:
= + dqs
dt dq, dt Sq2 dt 9qs dt
Prędkość liniowa i-tego punktu wyniesie zatem:
_ dĘ . dq . dĘ . vi +^-q2 +-+T-Lqs-
Przesunięcie wirtualne i-tego punktu wyniesie:
dr _ 9r 9r „
Sri =—H +——8q2 + ... + -—8qs oqi ^2 ^qs
Z równania (209) wyróżniamy wielkości:
8q, = k-q,
Sq2 -k-q2
8q2 = k • q2
(210)
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0090 1 , 1 , -ni g Xs +-k, ■ x„ 4k2 -xj; Z geometrii układu wiemy, że: xu = 1 • sin
Mechanika ogolna0075 VA * A przemieszczenie przygotowane punktu A będzie następujące: 8rA r ■ iS(p.
Mechanika ogolna0002 obrotowy bryły wokół nieruchomego punktu (ruch kulisty).... 7
Mechanika ogolna0004 1. DYNAMIKA PUNKTU MATERIALNEGO1.1. Siły działające na punkt materialny Siły te
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
Mechanika ogolna0013 20 W układzie nieruchomym równanie opisujące ruch punktu materialnego zapisywal
Mechanika ogolna0036 723.4. Dynamika układu brył ()pisując zjawisko ruchu układu brył, postępujemy w
Mechanika ogolna0046 M S;
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = co ■ h; = o> ■ -
Mechanika ogolna0052 Rys. 57 Wyrażenie i; x P; jest momentem siły Pj względem punktu O, co zapisze
Mechanika ogolna0073 146 Przyspieszenie normalne: ain=®2-1i. przyspieszenie styczne i-tego punktu: a
więcej podobnych podstron