Mechanika ogolna0075
VA '* A
przemieszczenie przygotowane punktu A będzie następujące: 8rA r ■ iS(p.
Dane:
s|™
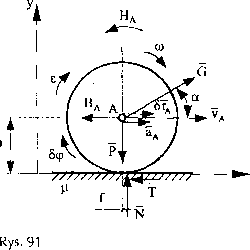
p - współczynnik tarcia suchego, a = const.
Siła bezwładności zaczepiona w środku masy to:
|BA = -m ■ a A,
K = m-aA.
Wektor momentu głównego sił bezwładności, również zaczepiony w środku masy, to:
Ha=-Ia-£,
K=IA-e.
Ogólne równanie dynamiki dotyczące omawianego przypadku:
5L = (p + G + Ń + T)5^+(T-r-N-f)5cp-BA-8r^-HA-8(p = 0,
więc:
(G • cos a - T - BA )8rA + (T • r - N ■ f - HA )8cp = 0,
. Ha n‘ Ha 1 |»rA - «>,
I
(Sr* / O,
c/yli:
G-cosa-BA -N—-Ha- = 0.
r r
Z równania równowagi krążka na kierunku osi y wiemy, że:
N = P - G ■ sin a,
siła bezwładności ruchu środka masy:
Ba =-xa.
g
moment główny sił bezwładności:
tt r P 2 xA
Ha =Ia -e=-r —k.
A 2-g r
Z ogólnego równania dynamiki mamy:
G-cosa-—xA -(P-G-sina)——^-r2i^- = o g r 2-g r2
Xa 3
a stąd przyspieszenie środka masy toczącego się krążka będzie wynosić: 2 G(r-cosa + f-sina)-P-f
P-r
Przykład 23
Dla mechanizmu płaskiego (rys. 92) określić przyspieszenie kątowe bryły 1, stosując ogólne równanie dynamiki.
Bryła 1 obraca się wokół punktu A, który jest jej środkiem masy. Zredukowanie siły bezwładności bryły 1 do punktu A daje:
BA=-nvaA=0,
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = co ■ h; = o> ■ -
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = m
Mechanika ogolna0080 160 Współrzędne punktu B będą następujące: xB =lj -cos(p + l2 COSV
skanuj0043 (26) 66 B. Cieślar Przemieszczenie przekroju położonego w odległości od punktu A będzie r
Podczas przemieszczania składników się w ekstruderze następuje zamiana części energii mechanicznej w
Charakterystyka przedmiotu Mechanika ogólna jest przedmiotem podstawowym, przygotowującym do studiow
Mechanika ogolna0002 obrotowy bryły wokół nieruchomego punktu (ruch kulisty).... 7
Mechanika ogolna0004 1. DYNAMIKA PUNKTU MATERIALNEGO1.1. Siły działające na punkt materialny Siły te
Mechanika ogolna0005 10 Równanie wektorowe opisujące ruch punktu materialnego ma postać wynikającą z
więcej podobnych podstron