Mechanika ogolna0073
146
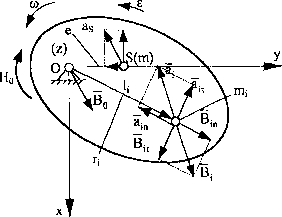
Przyspieszenie normalne:
ain=®2-1i.
przyspieszenie styczne i-tego punktu:
ah=e-li-
Siły fikcyjne to:
Bin =-mj • ain -tzw. siła odśrodkowa,
Bk = -nij • ak - tzw. siła bezwładności pochodząca od przyspieszenia stycznego.
Redukujemy układ sił bezwładności, np. do punktu O (tj. nieruchomego punklu leżącego na osi obrotu bryły), wówczas wektor główny sił bezwładności:
_ n _ n n
Bo =ZBi =X(~mi 'ai) = -Zmi - a* =-m-as
i=l i=l i-1
co do wartości:

B0 = m • as = m • e • V®4 + e2, gdzie e - odległość środka masy od punktu obrotu bryły.
Natomiast moment główny sił bezwładności:
n» '= S(TxB,) = Ż(TxBit) = Z[TX(-m,- • ak)] = £[*x(-Tri; ■ { i; > i.
il i I i=l i I
Układ sił bezwładności zredukowany do punktu O, to:
• wektor główny sił bezwładności B0,
• moment główny sił bezwładności H0,
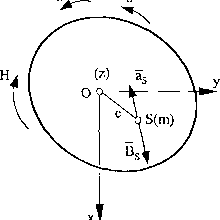
Za biegun redukcji możemy przyjmować dowolny punkt, np. środek masy bryły, jak pokazano na rys. 87.
co
6
X

Rys. 87
Bs = -m • as

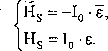
Ruch postępowy bryły (rys. 88)
Przyspieszenie dowolnego punktu należącego do bryły jest równe przyspieszeniu środka masy bryły:
Kilu bezwładności działająca na i-ty punkt to:
B,. = -m; -a,..
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0037 74 czyli:
Mechanika ogolna0009 (38) IX m-aMr=£Pir n m-aM<p =ZPi9 i=l Ponieważ aMr -rm -cp2 jest to wartość
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = m
Mechanika ogolna0040 KO Pochodna wektora jednostkowego jest równa prędkości liniowej końca tego wekt
Mechanika ogolna0051 Wit-IktiŃć okivŃlum
Mechanika ogolna0057 114 linergia całkowita układu wynosi więc: En=^(P,+3-P2 + 2P3). 4g lilcmentama
Mechanika Ogólna Wykład 3 pdf5 H—I—h lOźpótzędoe 3rodk& dift ukTolcJu $b i 00* = -% CSL; r, ^7
Mechanika Ogólna Wykład 4 pdf1 .{iednóLO.)c6i otplosi- toykfikd 4 Po redukcje aklkda weldhn&o
więcej podobnych podstron