Mechanika ogolna0070
140
Przykład 21
Określić reakcje układu płaskiego w punkcie C.
W punkcie C układu występują więzy typu podpora stała, której reakcję w płaszczyźnie xy przewidujemy jako dwie składowe wzajemnie do siebie prostopadłe. Przyjmujemy układ współrzędnych xy. Określamy składową Yc. Podporę zastępujemy takim więzem, aby możliwe było przemieszczenie na kierunku Yc (rys. 84).
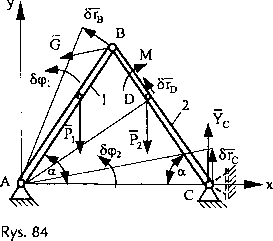
p11 - ciężary własne brył [N], a - kąt pochylenia bryły 1.
Dane:
AB = BC = 1 - wielkości geometryczne [m],
M - moment pary sił działających na bryłę 2 [N-m], G - siła czynna działająca na przegub B [N],
Określimy przemieszczenia przygotowane poszczególnych brył. Bryła 1 może obracać się dokoła punktu A. Bryła 2 jest w ruchu płaskim i jej środek chwilowego obrotu jest w punkcie A. Z kinematyki, z rozkładu prędkości możemy więc wykorzystać zależności na promienie i obroty przygotowane:
8rB = AB • Sep! = AB • 8<p2, bo vB = ABco^ABgc^,
8rc=AC-8(p2, bovc=AC-G)2.
Z geometrii układu wiadomo, że:
8rc — 2 -1 -8cp2 cosa,
8rB = 1 • 8cp, = 1 • 8cp2, czyli:
Sep, =8cp2.
Praca przygotowana układu sił będzie równa: 8l, = 8L, + 8L2 =0,
- I* • 1 • cos a + G • 1 • sin a 18<p,,
8L, =MA -8cp|
8L2 = P • 8^ + Md ■ 8(p2 = Ma • 8<p2
2-Yc -1-cosa-—P2 -1-cosa-M J8(p2,
SL = | P, -1-cosa + G -1-sina-f 2-Yr -1-cosa-—P, -1-cosa-M ]——-.
2 1 2 J 2-1-cosa
ale:
8rc ^ 0, czyli:
—^-(P, +3-P2)l-cosa + G-l-sina + 2-Yc -l-cosa-M = 0, stąd mamy:
v 2 • M + (P, + 3 • P2) 1 • cos a - 2 • G • 1 • sin a
— .
4- 1-cosa
Podobnie postąpimy, określając składową Xc w punkcie C.
Bryła 1 może wykonywać ru^lp obrotowy dokoła punktu A, bryła 2 jest w ruchu płaskim o chwilowym środku obrotu w punkcie C2 (rys. 85):
8r0 = AB-Scp, =BC2 -8<p2, bo vB = AB -co, =BC2 -oo2, 8rc = CC2 • 8(p2, bo vc =CC2-ft)2.
Bok AC2 trójkąta ACC2 wynosi:
AC
AC2 = —— = 2 • AB = 2-1, cos a
CC2=AC2-AB = 1,
8rB = 1 - 8<p, =l-8(p2,
Sep, =8<p2.
Wyszukiwarka
Podobne podstrony:
Mechanika ogolna0070 140Przykład 21 Określić reakcje układu płaskiego w punkcie C. W punkcie C układ
Mechanika ogolna0062 124 Przykład 16 Stosując kryterium Dirichleta, określić położenie równowagi sta
Mechanika ogólna0062 124 Przykład 16 Stosując kryterium Dirichleta, określić położenie równowagi sta
Mechanika ogólna0062 124 Przykład 16 Stosując kryterium Dirichleta, określić położenie równowagi sta
Mechanika ogolna0062 124 Przykład 16 Stosując kryterium Dirichleta, określić położenie równowagi sta
Mechanika ogolna0018 36 S - punkt nazywany środkiem masy układu, n m - ^rrij - masa całkowita układu
Mechanika ogolna0056 112Przykład 15 Opisać zjawisko ruchu układu pokazanego na rys. 65, stosując zas
Mechanika ogolna0068 136Przykład 19 Dla układu mechanicznego pokazanego na rys. 79 określić równowag
Mechanika ogolna0069 138Przykład 20 Określić siły reakcji więzów belki pokazanej na rys. 80. Belka w
więcej podobnych podstron