skanuj0041
wskazówkami zawartymi w cz.I p.4.2 - 4.4.
4. Obliczyć wartość modułu sztywności G badanego drutu oraz maksymalną niepewność względną tego pomiaru (Ar, ATq, AT\ oznaczają niepewności maksymalne odpowiednich pomiarów):
|
Al |
4- |
4Ar |
Ah |
_L |
2 A T0 |
+ |
2 Ar, | |
|
l |
i |
r |
h |
T |
0 1 |
e-7 ? 0 1 |
5. Przeprowadzić dyskusję otrzymanych wyników.
5. Uzupełnienie
Rozważmy cylindryczny pręt o długości 1 i promieniu r, którego jeden koniec jest zamocowany nieruchomo, a do drugiego przyłożony jest moment skręcający M (rys.3). Moment ten powoduje skręcenie dolnego końca pręta względem górnego o kąt cp i każdy element drutu ulega deformacji prostego ścinania. Aby wyprowadzić związek pomiędzy modułem sztywności G a wartością momentu M sił skręcających drut, należy przyjąć, że pręt składa się z wielu cylindrycznych współosiowych warstw, które obracają się dookoła osi pręta. Prostopadłościenny fragment warstwy o promieniu x, grubości dx i długości ds zostaje odkształcony, jak pokazano na rys.3, a pomiędzy kątem skręcenia 9 i kątem ścinania a zachodzi związek:
<px = al.
Zgodnie z prawem Hooke’a naprężenie styczne dane jest wzorem:
r=Ga=GSŁ, (10)
Naprężenie ścinania r jest równe sile stycznej dF działającej na brzeg równo-ległoboku, do pola powierzchni przekroju:
=
cbcds ’
Wartość momentu siły względem osi pręta wynosi:
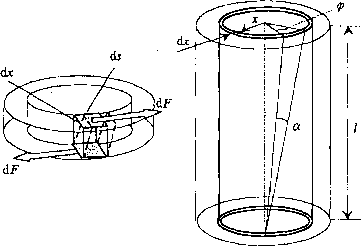
Rys.3. Schematyczne przedstawienie warstw cylindrycznego, skręcanego pręta
dM = xdF = Trcbcds.
Wartość momentu skręcającego dla cylindrycznej warstwy o grubości dr jest sumą takich momentów sił po pełnym obwodzie koła s = 2tcc:
dM =TrdrJds = 27tTx2dx.
Całkowity moment sił działający na pręt otrzymamy sumując przyczynki do momentu od wszystkich współosiowych rurek, od x = 0 do x = r. Uwzględniając wzór (10) otrzymujemy:
M ~ \dM = 27iG— jV dx = 71 Gr ę . (11)
o l o 2/
Literatura
[1] H.Szydłowski: Pracownia fizyczna, PWN, Warszawal994.
[2] R.P.Feynman, R.B.Leighton, M.Sands: Feynmana wykłady z fizyki, t.II, cz.2, PWN, Warszawa 1970.
[3] J.Massalski, M.Massalska: Fizyka dla inżynierów, t.l, WN-T, Warszawa 1975.
Wyszukiwarka
Podobne podstrony:
skanuj0041 80 wskazówkami zawartymi w cz.I p.4.2 - 4.4. 4. Obliczyć wartość modułu sztywności G bada
skanuj0049 4 Przepływ energii 127A. Obliczenia wartości strumieni na poziomie 2,0 m 1. Gradienty pos
skanuj0058 2 Jednomiany 65 13. Oblicz wartość wyrażenia 5x2-y dla: a) x = 3, y = 2
skanuj0099 (22) 178 B. Cieślar Obliczamy największą (co do wartości bezwzględnej) wartość momentu zg
skanuj0009 (136) Najpierw obliczamy wartość matematyczną wszystkich kart, np. wylosowaliśmy kolejno
skanuj0018c Obliczana wartość współczynnika dynamicznego nie może przekraczać granicznych wartości:
skanuj0031 (130) 44 Mathcad. Ćwiczenia 2. Oblicz wartości własne macierzy A (rysunek 3.52), posługuj
skanuj0099 (22) 178 B. Cieślar Obliczamy największą (co do wartości bezwzględnej) wartość momentu zg
więcej podobnych podstron