Strona0102
102
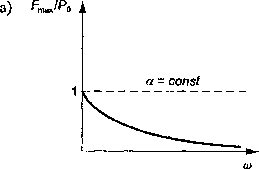
Rys. 4.6

ca na fundament przy stałym tłumieniu maleje ze wzrostem częstości drgań, a z rys. 4.6b, że przy stałej częstości drgań siła ta rośnie wraz ze wzrostem współczynnika tłumienia.
4.2. Wibroizolacja przy wymuszeniu skokowym
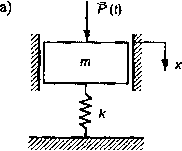
Poniżej wyznaczono siłę przenoszoną na fundament układu mechanicznego pokazanego na rys. 4.7a, jeżeli siła działająca na ten układ zmienia się skokowo (rys. 4.7b). Wartość tej siły można opisać następującą funkcją:
(4.25)
JR dla t>0
v [0 dla t< 0
b)
P(t)n
Po -
0-^
t Rys. 4.7
Dynamiczne równanie ruchu układu pokazanego na rys. 4.7 ma postać:
mx + kx~PQ dla t> 0 (4.26)
Rozwiązanie tego równania w ruchu ustalonym przy zerowych warunkach początkowych: t - 0, * = 0, x = 0 można zapisać w następującej postaci:
(4.27)
P Ję
x -—(1 - cos 0)Qi), (Ą = — k m
Wyszukiwarka
Podobne podstrony:
Strona0097 97 Siła przenoszona na fundament jest równa sile sprężystej i sile przenoszonej przez tłu
Strona0103 103 Siłę przenoszoną na fundament określa zależność: F(t) = kx = PQ(l - coso>0t)
55174 strona (334) 5. Brak reakcji na stymulację prądem stałym zazwyczaj świadczy o przerwaniu
ZBAWIENIE PRZEZ SZCZĘŚCIE 853 cą na miano szczęścia. Jest rzeczą oczywistą, że cel tego rodzaju możn
IMG!57 NOŚNOŚĆ NA ŚCINANIE PRZY PRZEBICIU PŁYT I STÓP FUNDAMENTOWYCH BEZ ZBROJENIA NA ŚCINANIE (2) N
SAVE0445 [] Osłony i maska silnika (rys. 102) Montuje sie na specjalne życzenie klienta do ciągników
SAVE0445 [] Osłony i maska silnika (rys. 102) Montuje sie na specjalne życzenie klienta do ciągników
strona038 38 3. PRZEDSTAWIANIE PRZEDMIOTÓW NA RYSUNKU RYS. 3.23 Przykład przekrojów z częściami złąc
IMGW70 AD=C+I AD = Ca + ksk*Y+la - określa łączne zamierzone wydatki na towary prz
IMG?23 (2) (3 22a), która jest podstawą analogowego odwzorowania napięcia stałego na czas Przy danym
Rys. 2. Schemat zamknięcia zainicjowanej szczeliny na długość 8* przy pomocy naprężeń ściskających
więcej podobnych podstron