Strona0149
149
gdzie:
fi*=33,54s“\ <a2 =40,87 s“\ /i, =-0,314, ju2-12,01

Zadanie 6.3
Dla układu mechanicznego jak na rys. 6.12 wyznaczyć częstość drgań własnych oraz równania dynamiczne mchu i postacie główne. Za początek odczytu mchu przyjąć położenie spoczynkowe ciała 1 (przy statycznym odkształceniu sprężyny). Masy linek i sprężyn oraz masowe momenty bezwładności skręconych wałów pominąć. Dane do obliczeń: ml -8kg, m2 = 2kg, kx -20N/cm, k2 -15 N/cm.
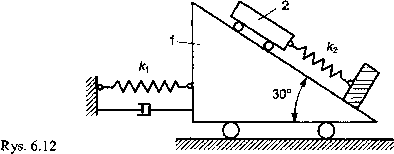
Rozwiązanie:
{mx cos30°x2 + kxxx = 0
m2 cos30°^ + m2x2 + k2x2 = 0
G)l —14,08s~!, m2 =31,03s“1, //,=0,29, ^=-2,53
Wyszukiwarka
Podobne podstrony:
Strona0152 152Zadanie 6.7 Dla układu mechanicznego jak na rys. 6.16 wyznaczyć częstość drgań własnyc
strona07 Całkowite opory ruchu Tc w prowadnicy typu (J) gdzie: Fi - obciążenie stolika, Fi = 5 N Opo
Strona0140 140 gdzie: mx,m2 - masy drgające, klyk2,k - współczynniki sprężystości, ax, a2, a - współ
Strona0142 142 gdzie: Ą =^AU+Ai2 = ~^Di +D2 , -A <m=— ^=1/ą2]+4=
img006 *0 fi i) fn3a ———jdx J° (a2-a2)5 jj r2 da dl xV3a2—2a—1 u I r+oO dx
Strona00149 - 149 - 134. Czujnik wilgoci z przekaźnikiem Odrębność powyższego układu w stosunku do p
page0360 350 S. DlCKSTEIN. Jeżeli <1* = F(z), f (z) = £, gdzie Fi f są funkcyami analitycznemi zm
IMAG0213 —33,60 m3/d Qśrd~ _LM-qj __8400*41000 1000. Qmaxd=33,60-1,20=40,32 m3/d 3.2.8. Jednostka
img006 *0 fi i) fn3a ———jdx J° (a2-a2)5 jj r2 da dl xV3a2—2a—1 u I r+oO dx
więcej podobnych podstron