0000051
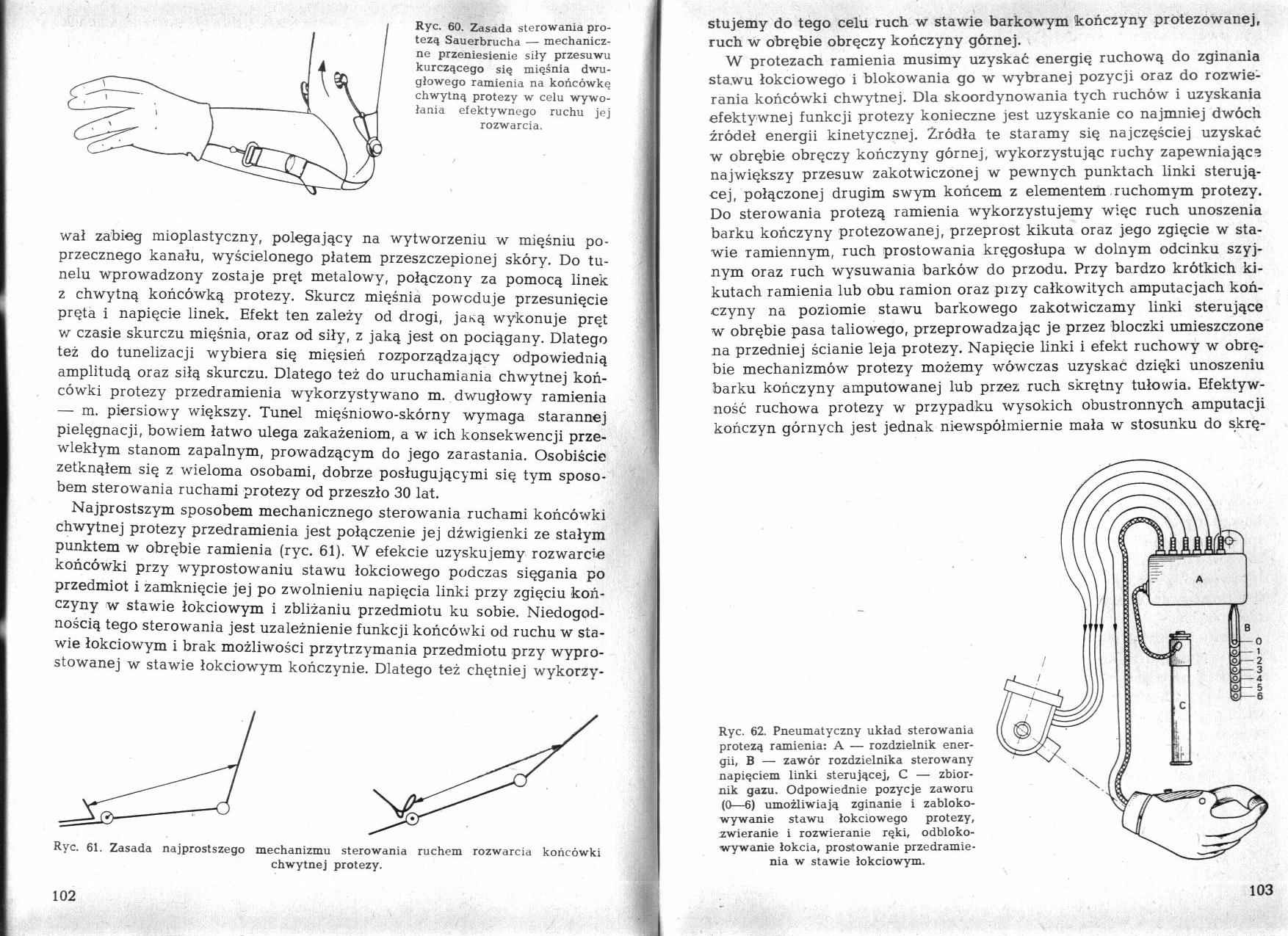
Ryc. 60. Zasada sterowania protezą Sauerbrucha — mechaniczne przeniesienie siły przesuwu kurczącego się mięśnia dwugłowego ramienia na końcówkę chwytną protezy w celu wywołania efektywnego ruchu jej
rozwarcia.
wał zabieg mioplastyczny, polegający na wytworzeniu w mięśniu poprzecznego kanału, wyścielonego płatem przeszczepionej skóry. Do tunelu wprowadzony zostaje pręt metalowy, połączony za pomocą linek z chwytną końcówką protezy. Skurcz mięśnia powoduje przesunięcie pręta i napięcie linek. Efekt ten zależy od drogi, jaKą wykonuje pręt w czasie skurczu mięśnia, oraz od siły, z jaką jest on pociągany. Dlatego też do tunelizacji wybiera się mięsień rozporządzający odpowiednią amplitudą oraz siłą skurczu. Dlatego też do uruchamiania chwytnej końcówki protezy przedramienia wykorzystywano m. dwugłowy ramienia — m. piersiowy większy. Tunel mięśniowo-skórny wymaga starannej pielęgnacji, bowiem łatwo ulega zakażeniom, a w ich konsekwencji przewlekłym stanom zapalnym, prowadzącym do jego zarastania. Osobiście zetknąłem się z wieloma osobami, dobrze posługującymi się tym sposobem sterowania ruchami protezy od przeszło 30 lat.
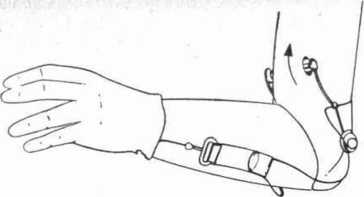
Najprostszym sposobem mechanicznego sterowania ruchami końcówki chwytnej protezy przedramienia jest połączenie jej dźwigienki ze stałym punktem w obrębie ramienia (ryc. 61). W efekcie uzyskujemy rozwarcie końcówki przy wyprostowaniu stawu łokciowego podczas sięgania po przedmiot i zamknięcie jej po zwolnieniu napięcia linki przy zgięciu kończyny w stawie łokciowym i zbliżaniu przedmiotu ku sobie. Niedogodnością tego sterowania jest uzależnienie funkcji końcówki od ruchu w stawie łokciowym i brak możliwości przytrzymania przedmiotu przy wyprostowanej w stawie łokciowym kończynie. Dlatego też chętniej wykorzy-
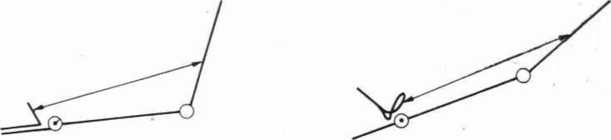
Ryc. 61. Zasada najprostszego mechanizmu sterowania ruchem rozwarcia końcówki
chwytnej protezy.
stu jemy do tego celu ruch w stawie barkowym kończyny protezowanej, ruch w obrębie obręczy kończyny górnej.
W protezach ramienia musimy uzyskać energię ruchową do zginania stawu łokciowego i blokowania go w wybranej pozycji oraz do rozwierania końcówki chwytnej. Dla skoordynowania tych ruchów i uzyskania efektywnej funkcji protezy konieczne jest uzyskanie co najmniej dwóch źródeł energii kinetycznej. Źródła te staramy się najczęściej uzyskać w obrębie obręczy kończyny górnej, wykorzystując ruchy zapewniając? największy przesuw zakotwiczonej w pewnych punktach linki sterującej, połączonej drugim swym końcem z elementem ruchomym protezy. Do sterowania protezą ramienia wykorzystujemy więc ruch unoszenia barku kończyny protezowanej, przeprost kikuta oraz jego zgięcie w stawie ramiennym, ruch prostowania kręgosłupa w dolnym odcinku szyjnym oraz ruch wysuwania barków do przodu. Przy bardzo krótkich kikutach ramienia lub obu ramion oraz pizy całkowitych amputacjach kończyny na poziomie stawu barkowego zakotwiczamy linki sterujące w obrębie pasa taliowego, przeprowadzając je przez bloczki umieszczone na przedniej ścianie leja protezy. Napięcie linki i efekt ruchowy w obrębie mechanizmów protezy możemy wówczas uzyskać dzięki unoszeniu barku kończyny amputowanej lub przez ruch skrętny tułowia. Efektywność ruchowa protezy w przypadku wysokich obustronnych amputacji kończyn górnych jest jednak niewspółmiernie mała w stosunku do skrę-
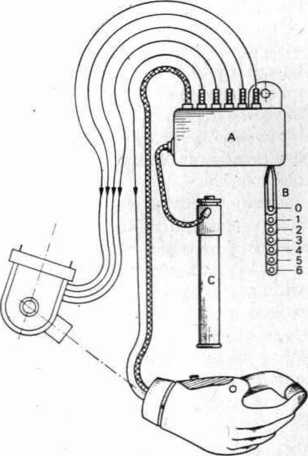
Ryc. 62. Pneumatyczny układ sterowania protezą ramienia: A — rozdzielnik energii, B — zawór rozdzielnika sterowany napięciem linki sterującej, C — zbiornik gazu. Odpowiednie pozycje zaworu (0—6) umożliwiają zginanie i zabloko-wywanie stawu łokciowego protezy, zwieranie i rozwieranie ręki, odblokowywanie łokcia, prostowanie przedramienia w stawie łokciowym.
103
Wyszukiwarka
Podobne podstrony:
/ Ryc. 81. Zawieszenie sterujące protezy przedramienia. W ten sposób linka przesuwająca się przez
G A Ryc. 20. Zasada stabilizacji miednicy w płaszczyźnie strzałkowej przy podparciu masy ciała na pr
Ryc. 86. Układ sterowania stosowany w protezach hybrydowych u osób po amputacji obu kończyn górnych
ksiega�9 126 126 Ryc- 60 Pizcbicg mięśni wiclod/jd-nych (m mulnfijus) w odcinku lędż-wwwyw
SAVE1656 [] Zespól 35 Tablica 34 Metbanbm kierowniczy i sterowanie pompy paliwowej
strona (92) Ryc. 4-20. Urządzenie do masażu infradźwiękowego. Infradźwięki przenikają przez odzież.
instalacje069 1. WSTĘP 22 przekładni zębatej z czterokrawędziowym suwakiem sterowniczym 3. Suwak jes
page0219 14* Ryc. 49. T e 11 o h, Głowa śumeryjska (Gudei?; — por. ryc. 5,60, 78, 79, 99 100, 1
page0222 17* 17* Ryc. 60. a) Urnina z synami; b) Gudea, patesi z Lagaś (por. ryc. 5, 49, 78, 79, 99,
page0227 22* Ryc. 76. Nippur, wotywna tabliczka Sumerów (por. ryc. 60 a) Ryc. 78. Dostojnik sta-rośu
K ?jna DIALEKTY POLSKIEz890 Mapa 60. Zastąpienie końcówki -i liczebników ‘5-10’przez -u. przeniesion
skanuj0006 (60) POLITECHNIKA LUBELSKA Katedra Termodynamiki, Mechaniki Płynów i Napędów Lotniczych L
skanuj0196 [1600x1200] Detektor półprzewodnikowy Si (Li) Ryc. 8.14. Zasada działania fluorescencyjne
20573 ksiega�9 126 126 Ryc- 60 Pizcbicg mięśni wiclod/jd-nych (m mulnfijus) w odcinku lędż-wwwyw
więcej podobnych podstron