042 2
42
4. PRZEKŁADNIE ŚLIMAKOWE (rys. 1.5.4.10)
4.1. Wartości sił obciążających wały (1.5.2.7 p. 6).
4.2. Punkt przykładania sił biegun zazębienia C.
4.3. Przed wyznaczeniem kierunku sił działających w zazębieniu i obciążających wały przekładni muszą być znane:
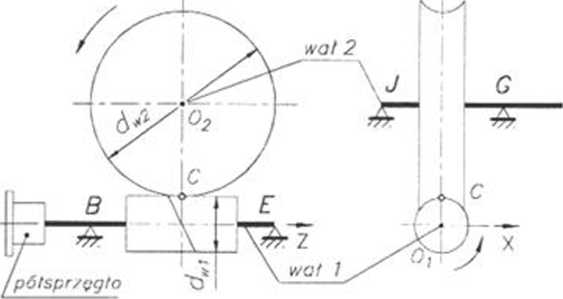
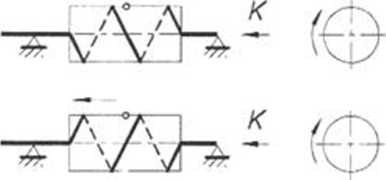
- kierunek nacinania linii zwoju ślimaka (prawy lub lewy) (rys. 1.5.4.11),
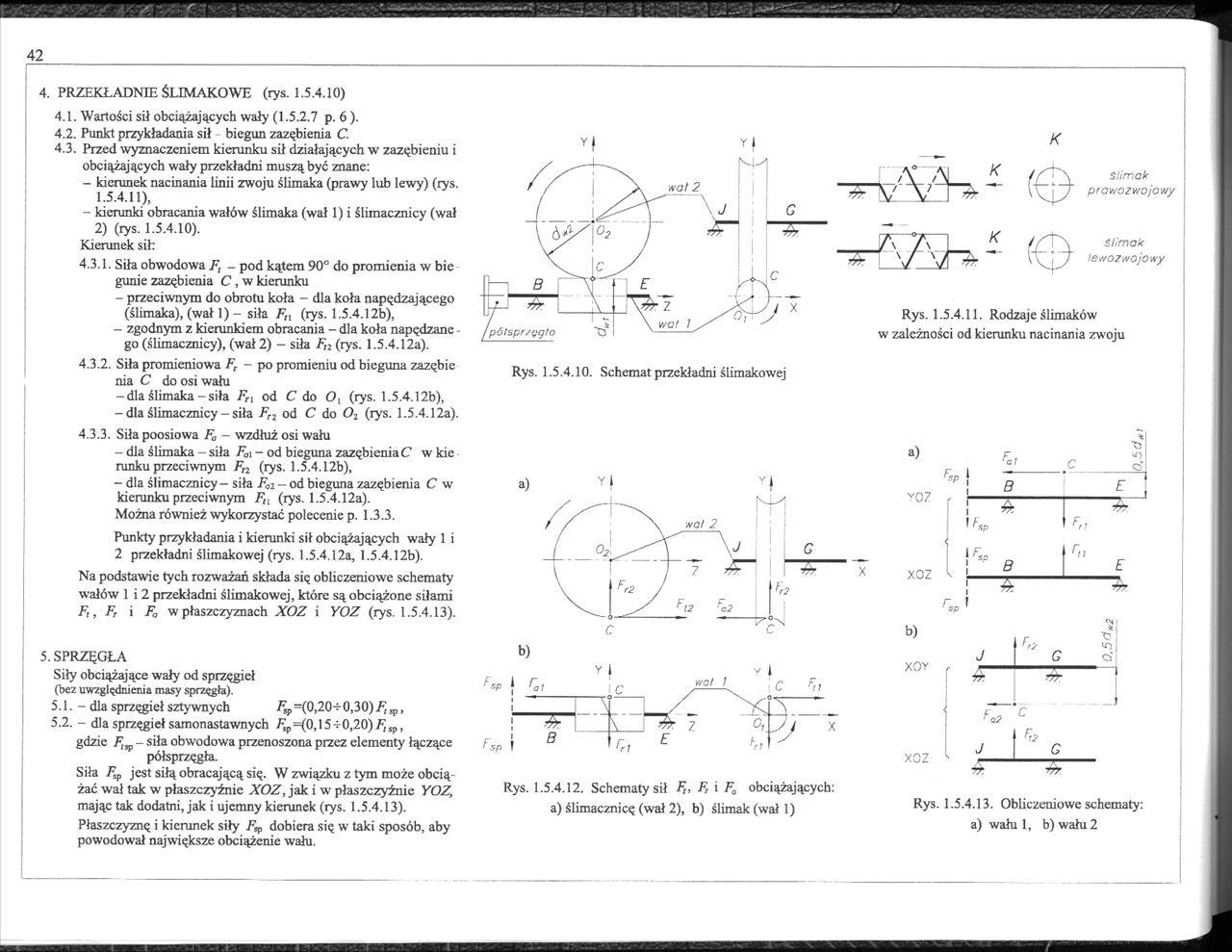
- kierunki obracania wałów ślimaka (wał 1) i ślimacznicy (wał 2) (rys. 1.5.4.10).
Kierunek sił:
4.3.1. Siła obwodowa F, - pod kątem 90° do promienia w bie gunie zazębienia C, w kierunku
- przeciwnym do obrotu koła - dla koła napędzającego (ślimaka), (wał 1) - siła Ftx (rys. 1.5.4.12b),
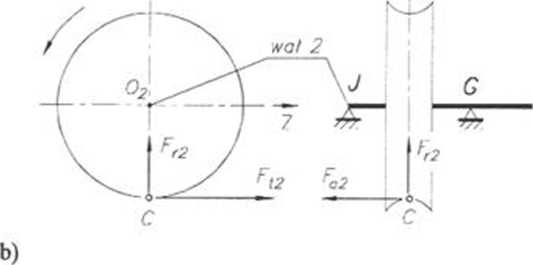
- zgodnym z kierunkiem obracania - dla koła napędzane go (ślimacznicy), (wał 2) - siła F,2 (rys. 1.5.4.12a).
4.3.2. Siła promieniowa Fr - po promieniu od bieguna zazębię nia C do osi wału
- dla ślimaka - siła />, od C do O, (rys. 1.5.4.12b),
- dla ślimacznicy - siła Fn od C do Oz (rys. 1.5.4.12a).
4.3.3. Siła poosiowa Fa - wzdłuż osi wału
- dla ślimaka - siła FoX - od bieguna zazębienia C w kie runku przeciwnym Fn (rys. 1.5.4.12b),
- dla ślimacznicy - siła F0i~ od bieguna zazębienia C w kierunku przeciwnym Ftx (rys. 1.5.4.12a).
Można również wykorzystać polecenie p. 1.3.3.
Punkty przykładania i kierunki sił obciążających wały 1 i 2 przekładni ślimakowej (rys. 1.5.4.12a, 1.5.4.12b).
Na podstawie tych rozważań składa się obliczeniowe schematy wałów 1 i 2 przekładni ślimakowej, które są obciążone siłami Fty Fr i F, w płaszczyznach XOZ i YOZ (rys. 1.5.4.13).
5. SPRZĘGŁA
Siły obciążające wały od sprzęgieł (bez uwzględnienia masy sprzęgła).
5.1. - dla sprzęgieł sztywnych F^ =(0,20-^0,30)/;^,
5.2. - dla sprzęgieł samonastawnych Fip =(0,15^0,20)/^,
gdzie Fttp- siła obwodowa przenoszona przez elementy łączące półsprzęgła.
Siła Fip jest siłą obracającą się. W związku z tym może obciążać wał tak w płaszczyźnie XOZ, jak i w płaszczyźnie YOZ, mając tak dodatni, jak i ujemny kierunek (rys. 1.5.4.13).
Płaszczyznę i kierunek siły /*ip dobiera się w taki sposób, aby powodował największe obciążenie wału.
Ył
Yl
Rys. 1.5.4.10. Schemat przekładni ślimakowej
Ślimak
prawozwoiowy
S limak ie//oz//ojo#y
Rys. 1.5.4.11. Rodzaje ślimaków w zależności od kierunku nacinania zwoju
a)
Y1
Y 1
Y 1
*£/_/ c Fn
IC y-\ ^
"p ! ral
Rys. 1.5.4.12. Schematy sił Ę, Fr i Fa obciążających: a) ślimacznicę (wał 2), b) ślimak (wał 1)
a)
vO 7
rsp
|
1 1 1 |
*al |
t?! 3 |
|
B |
, i ! | |
|
1 1 |
~5~ |
A |
|
"sp |
I |
1 F„ |
\F
sp
u
|
J |
r* |
G |
°i |
|
£ |
A |
ł | |
|
*07 |
c | ||
|
J 1 |
| *12 |
G |
Rys. 1.5.4.13. Obliczeniowe schematy: a) wału 1, b) wału 2

Wyszukiwarka
Podobne podstrony:
42 4. PRZEKŁADNIE ŚLIMAKOWE (rys. 1.5.4.10) 4.1. Wartości sil
kurmaz042 42 4. PRZEKŁADNIE ŚLIMAKOWE (rys. 1.5.4.10) 4.1. Wartości sil obciążając
M Feld TBM651 13.10. Obróbka przekładni ślimakowych651 RYS. 13.120. Obróbka ślimaka o małym kącie RY
M Feld TBM653 653 13.10. Obróbka przekładni ślimakowych RYS. 13.126. Nacinanie ślimaka metodą obwie-
Skrypt PKM 1 00055 110 Zadanie 3.6 Koto zębate przekładni tokarki (rys. 3.10) osadzono su wl i wie n
HWScan00225 ^■ V». Ja4avV ws Rys. 6.10. Układ Sił w pracy mechanizmu wysuwu “-“z^z: z*£łrz. /
Stateczność układów prętowych S9 pokazano na rys. 5.6. Wyznaczone wartości sił krytycznych oraz wyni
DSCN0559 152 4 Smarowanie przekładni zębatych Rys. 4.10. Schemat smarowania natryskowego ciężkiej pr
skanowanie0001 (190) Rys. 5.73. Schemat przekładni łańcuchowejF, Rys. 5.79. Rozkład sił działających
Przekładnie Zębate040 Rys. 3.10. Zmiana współczynnika prędkości Zv w funkcji prędkości obwodowej prz
401.5 1. ZĘBATE PRZEKŁADNIE WALCOWE (rys. 1.5.4.1) 1.1. Wartości sił
401.5.4. WAŁY 1. ZĘBATE PRZEKŁADNIE WALCOWE (rys. 1.5.4.1) 1.1. Wartości sil
041 2 Yf 2. ZĘBATE PRZEKŁADNIE STOŻKOWE (rys. 1.5.4.5) 2.1. Wartości sił obciążają
kurmaz040 40 1. ZĘBATE PRZEKŁADNIE WALCOWE (rys. 1.5.4.1) 1.1. Wartości sił obciąż
więcej podobnych podstron