054 3
104
|
QjX Q2Q3\ 00 |
01 |
11 |
QjX 1° Q2Q3\ 00 |
01 |
11 |
10 | |||
|
00 |
- |
- |
- |
00 |
■ 0 |
'l |
A |
- | |
|
01 |
- |
- |
- |
- |
01 |
1 |
1 |
- |
_ \ |
|
11 |
- |
- |
- |
- |
11 |
- |
- |
- |
- |
|
10 |
v |
- |
- |
1 / |
10 |
- |
- |
- | |
|
QjX Q2Q3\ |
00 |
01 |
11 |
K 10 |
1 QjX Q2Q3\ |
00 |
01 |
11 |
J2 10 |
|
00 |
- |
- |
•— |
00 |
n |
0 |
- | ||
|
01 |
r _ |
- |
- |
- |
01 |
> |
- |
- |
- |
|
11 |
i V |
1 |
- |
- |
11 |
- |
-j |
- | |
|
10 |
0 |
0 |
l) |
10 |
0 |
1 |
0 | ||
K
2
J
3
QjX
Q2Q3'
|
\ |
00 |
01 |
11 |
10 |
|
00 |
- |
- |
- | |
|
01 |
0 |
1 |
- |
- |
|
11 |
(\ |
1 |
- | |
|
10 |
- |
- |
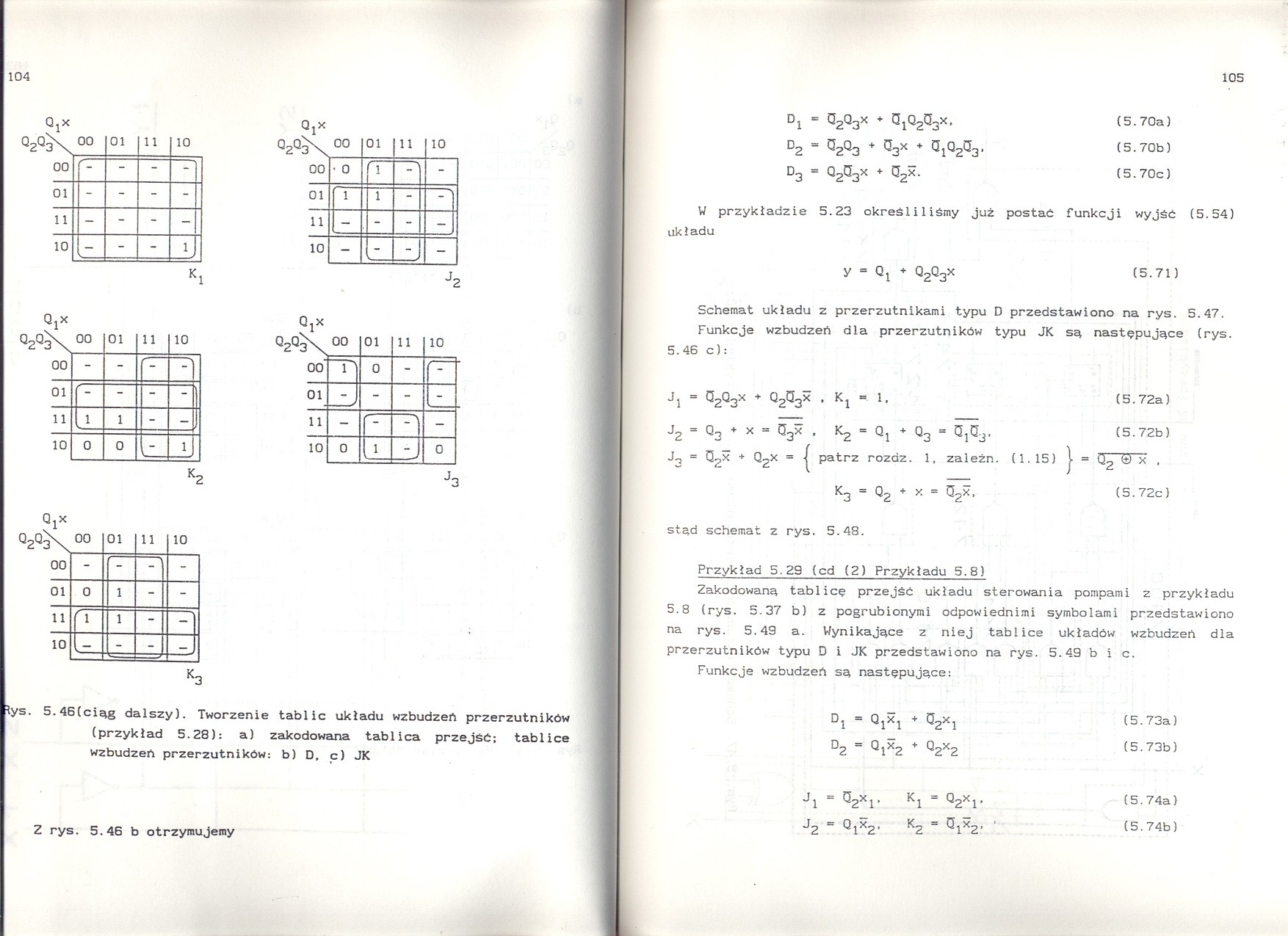
^ys. 5.46(ciąg dalszy). Tworzenie tablic układu wzbudzeń przerzutników (przykład 5.28): a) zakodowana tablica przejść; tablice wzbudzeń przerzutników: b) D, c) JK
2 rys. 5.46 b otrzymujemy
|
D1 ” ^2Q3X * ^1^2^3X’ |
(5.70a) |
|
°2 = ^2^3 + ^3X + ^1Q2^3’ |
(5.70b) |
|
D3 = Q2Q3X + Q2x- |
(5.70c) |
W przykładzie 5.23 określiliśmy już postać funkcji wyjść (5.54) układu
y = + Q2Q3x (5.71)
Schemat układu z przerzutnikami typu D przedstawiono na rys. 5.47. Funkcje wzbudzeń dla przerzutników typu JK są następujące (rys. 5.46 c):
|
J1 “ ^2^3X + ^2^3X |
• K1 = |
1. |
(5.72a) | |
|
J2 = Q3 + X = Q3X ■ |
k2 = |
Q1 + |
q3 = a,a3. |
(5.72b) |
|
J3 = ^2X + Q2X = { |
patrz |
rozóz. |
1. zależn. (1.15) |
[ = • |
|
K3 = |
q2 + |
x = Q2x, |
(5.72c) |
stąd schemat z rys. 5.48.
Przykład 5.29 (cd (2) Przykładu 5.8)
Zakodowaną tablicę przejść układu sterowania pompami z przykładu 5.8 (rys. 5.37 b) z pogrubionymi odpowiednimi symbolami przedstawiono na rys. 5.49 a. Wynikające z niej tablice układów wzbudzeń dla przerzutników typu D i JK przedstawiono na rys. 5.49 b i c.
Funkcje wzbudzeń są następujące:
|
D1 " Qlxl |
+ |
C2X1 |
(5.73a) |
|
D2 = Q1X2 |
+ |
Q2x2 |
(5.73b) |
|
= a2xl( |
K1 |
= Q2X!. |
(5.74a) |
|
= QjX2, |
K2 |
= |
(S.74b) |
Wyszukiwarka
Podobne podstrony:
Image227 DC ^BA 00 01 11 10 10 11 01 00 JO 01 1 1
2 (411) X3,X2X
uc test1 czysty io- 00 11- 01 I2- 10 I3- yf A B -Out 1. Uzupełnij rysunek tak, aby powstał 4-wej
012 013 12 12 01 11 10 V OB 01 00 00 11
Brushless2 Ma^stab 52, 00/ Datei BRUSH2ESS2 Zeichner Blatb 01/01 Anderung 10. 11.
CCI20090626�004 00 01 11 10 Sl s i i *2 ^5 S2 - - 54 Ss Sj Sj 52
177 3 a) b) f) 00 01 xlx2 * 00 01 11 10 y (00)- 1 O O 5 4 0 (ID-
ScannedImage 2 (7) A.J 00 01 11 10 A [ ® ® 3 1 i © 4 ! 0 f® 2 5i © I <3> Aj 6
^X±X2 Ql 00 01 11 10 *1*2 Ql (?2^^ 00 01 11 10 00 0 0 1 1 00 r
pkc15 xtxi 0.0, 00 01 11 10 oo 10.11 10.01 00
CCI20090626�004 00 01 11 10 Sl s i i *2 ^5 S2 - - 54 Ss Sj Sj 52
więcej podobnych podstron