058 5
roboczej i buforowej. W tym okresie wypornik znajduje się w sąsiedztwie GMP dzięki sile gazowej działającej na powierzchnię trzonu wypornika i wynikającej z różnicy ciśnień Ap = p - p .
g b
Jednakże tłok pod wpływem zmagazynowanej w nim ponownie energii kinetycznej przekracza położenie równowagi ciśnień p = p , a poruszając się dalej spręża gaz
g b
w przestrzeni roboczej. Zwiększone ciśnienie p działające również na wypornik
g
powoduje wytworzenie siły, która zapoczątkowuje jego ruch w stronę tłoka. Zbliżanie się tłoka do wypornika wywołuje przepływ gazu roboczego z zimnej przestrzeni sprężania do gorącej przestrzeni rozprężania, przyczyniając się do dalszego zwiększenia ciśnienia gazu roboczego. Kontynuacja zjawiska staje się w końcu przyczyną zatrzymania tłoka i zapoczątkowania jego ruchu powrotnego w stronę DMP. Poruszający się już w stronę DMP wypornik, poddany działaniu siły gazowej, przetłacza gaz do przestrzeni gorącej i w pewnym momencie zbliża się do tłoka silnika. Od tej chwili zjawiska zachodzące wewnątrz przestrzeni roboczej zaczynają przebiegać w sposób opisany na początku, gdyż w silniku zakończył się jeden i rozpoczyna kolejny obieg cieplny.
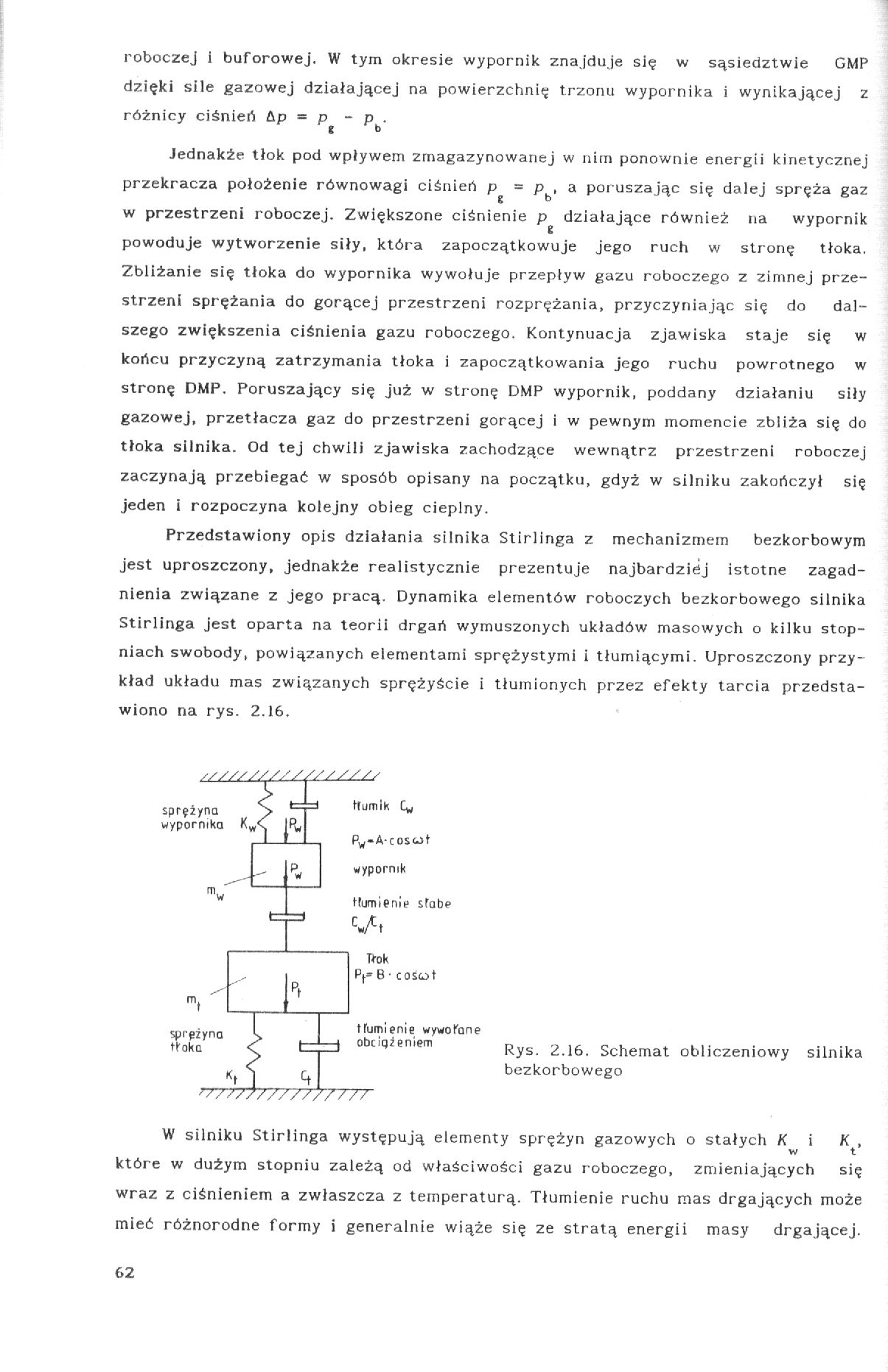
Przedstawiony opis działania silnika Stirlinga z mechanizmem bezkorbowym jest uproszczony, jednakże realistycznie prezentuje najbardziej istotne zagadnienia związane z jego pracą. Dynamika elementów roboczych bezkorbowego silnika Stirlinga jest oparta na teorii drgań wymuszonych układów masowych o kilku stopniach swobody, powiązanych elementami sprężystymi i tłumiącymi. Uproszczony przykład układu mas związanych sprężyście i tłumionych przez efekty tarcia przedstawiono na rys. 2.16.
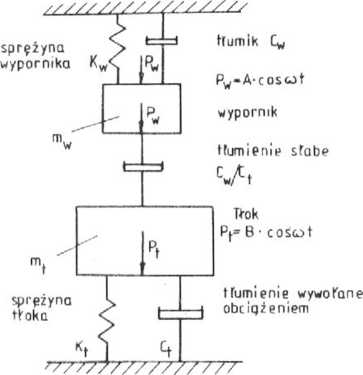
Rys. 2.16. Schemat obliczeniowy silnika bezkorbowego
W silniku Stirlinga występują elementy sprężyn gazowych o stałych Ki K ,
w t
które w dużym stopniu zależą od właściwości gazu roboczego, zmieniających się wraz z ciśnieniem a zwłaszcza z temperaturą. Tłumienie ruchu mas drgających może mieć różnorodne formy i generalnie wiąże się ze stratą energii masy drgającej.
62
Wyszukiwarka
Podobne podstrony:
skanuj0006 (178) które stanowią biologiczną podstawę życia psychicznego. W tym okresie szyba rozwija
44446 IMG?14 kwasy karboksylowe posiadają grupę karboksylową: przy tym samym węglu znajduje się zaró
howtodraw Kędy dwie osoby Uąoboksebe. można je wpisać w prostopadłościan. O tym czy postać znajduje&
77772 IMG?12 kwasy karboksylowe posiadają grupę karboksylową: przy tym samym węglu znajduje się zaró
DSCF2049 Na tym samym schemacie znajduje się przełącznik źródła wyzwalania wewnętrznego PK204. Przeł
Burda030 • Siatkowy wzórpatentowy W tym wzorze narzuty znajdujące się na prawej st
19801 IMG?13 kwasy karboksylowe posiadają grupę karboksylową: przy tym samym węglu znajduje się zaró
danych (Post Processed Kinematic Solution). W tym trybie, odbiornik znajdujący się na poruszającej s
DSCF4992 runków do normalnej działalności. Zlikwidowano w tym kilkadziesiąt zakładów znajdujących si
skanowanie0002 Inne objawy: W którym okresie hospitalizacji znajduje się
związki metali wspomagające promienioterapię 365 Badany w tym samym eksperymencie, znajdujący się
najmniejszy. Jeżeli w tym okresie nie zastosuje się leczenia przeciwbólowego to pozycja przeciwbólow
więcej podobnych podstron