099 4
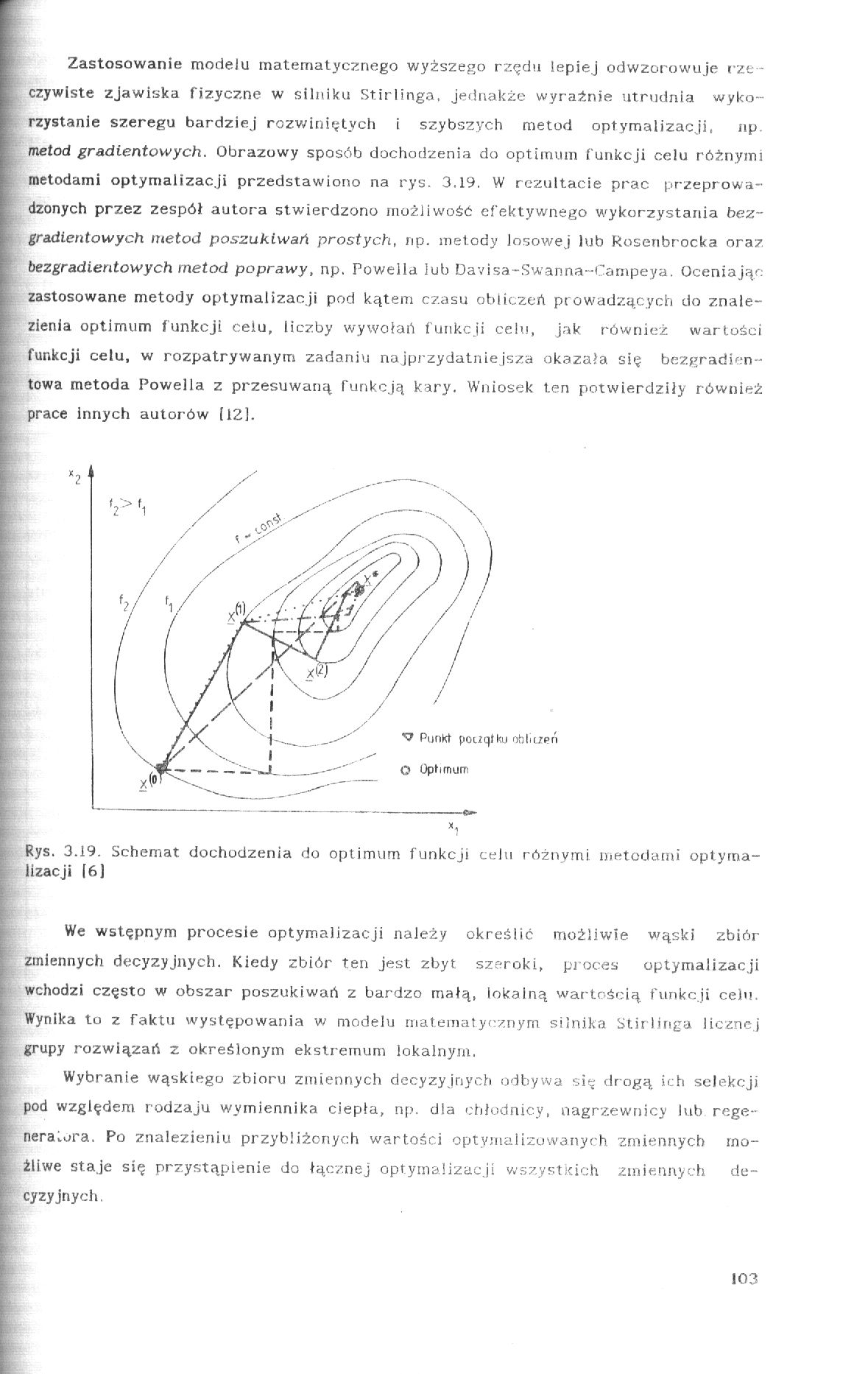
Zastosowanie modelu matematycznego wyższego rzędu lepiej odwzorowuje rzeczywiste zjawiska fizyczne w silniku Stirlinga, jednakże wyraźnie utrudnia wykorzystanie szeregu bardziej rozwiniętych i szybszych metod optymalizacji, np metod gradientowych. Obrazowy sposób dochodzenia do optimum funkcji celu różnymi metodami optymalizacji przedstawiono na rys. 3.19. W rezultacie prac przeprowadzonych przez zespół autora stwierdzono możliwość efektywnego wykorzystania bez-gradientowych metod poszukiwań prostych, lip. metody losowej lub Rosenbrocka oraz bezgradieritowych metod poprawy, np. Poweila lub Davisa-Swanna-Carnpeya. Oceniając zastosowane metody optymalizacji pod kątem czasu obliczeń prowadzących do znalezienia optimum funkcji celu, liczby wywołań funkcji celu, jak również wartości funkcji celu, w rozpatrywanym zadaniu najprzydatniejsza okazała się bezgradien-towa metoda Poweila z przesuwaną funkcją kary. Wniosek ten potwierdziły również prace innych autorów [121.
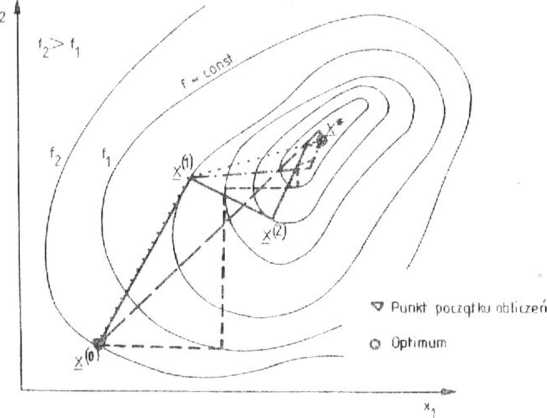
Rys. 3.19. Schemat dochodzenia do optimum funkcji celu różnymi metodami optymalizacji |6]
We wstępnym procesie optymalizacji należy określić możliwie wąski zbiór zmiennych decyzyjnych. Kiedy zbiór ten jest zbyt szeroki, proces optymalizacji wchodzi często w obszar poszukiwań z bardzo małą, lokalną wartością funkcji celu. Wynika to z faktu występowania w modelu matematycznym silnika Stirlinga licznej grupy rozwiązań z określonym ekstremum lokalnym.
Wybranie wąskiego zbioru zmiennych decyzyjnych odbywa się drogą ich selekcji pod względem rodzaju wymiennika ciepła, np. dla chłodnicy, nagrzewnicy lub regeneratora. Po znalezieniu przybliżonych wartości optymalizowanych zmiennych możliwe staje się przystąpienie do łącznej optymalizacji wszystkich zmiennych decyzyjnych .
103
Wyszukiwarka
Podobne podstrony:
Języki numeryczne wyższego rzędu i języki operujące symbolami matematycznymi: Derive (Soft
skanuj0013 Biologia nowotworzenia - Ćwiczenie 3 wyższego rzędu. Na przykład wzrost nowotworu poza to
128 A. Wiktor, K. Łuczywek, D. Witrowa-Rajchert Celem pracy był wybór odpowiedniego modelu matematyc
3. Przedziałowy algorytm wyższego rzędu Moore w pracy [33] podał wzory na metody jednokrokowe wyższy
IMG$88 198 JĘZYK I METODA KS. I, K. i* że narody mogą posiadać wyższego rzędu geniuszy dopiero
skanuj0080 3 5. Równowag jonowe w roxcterictonjch roawtradi wodnych Ocena kompletności modelu matema
1. Wstęp Tematyka niniejszej rozprawy dotyczy zastosowania modelowania matematycznego, zarówno do op
184 - Elementy matematyki wyższej, patrz Wydz. Chem. L. 401. 701. Analiza II., wyk
pełne obliczenia wybranego fragmentu ściany lub filarka z zastosowaniem modelu przegubowego i ciągłe
Transformacja modelu matematycznego maszyny elektrycznej dla obwodów stojana
Uwaga. W związku z zastosowaniem w modelu układu wzmacniaczy operacyjnych typu LM741, istnieje zależ
16 Graficzne wyniki symulacji danych rynkowych - czynników ryzyka na przykładzie zastosowania modelu
28 luty 09 (97) 97 43. ALGORYTM DO SPRAWDZANIA NOŚNOŚCI ŚCIAN Z ZASTOSOWANIEM MODELU
więcej podobnych podstron