140 4

274
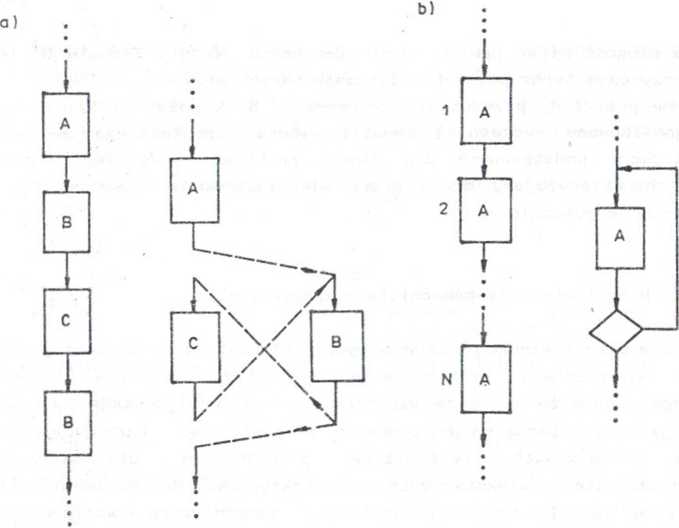
Rys. 7.23. Obsługa powtarzających się fragmentów mikroprogramu: a) podprogram, b) pętla [161
ZESPÓL PPM 1
(7,57a) (7.57b)
A.: PUSH A. + j; go to Ay W = < K, B >,
A^: POP; W = < K >.
Stos zawiera odpowiednie adresy, więc przeznaczenie informacji odczytanej ze stosu jest określone jednoznacznie i dlatego opuszczamy po wyrażeniu POP człon go to A. Odpowiednie segmenty sieci działań przedstawiono na rys. 7.24 a.
W mikroinstrukcji (7.57 b) nie wykorzystuje się całego słowa, można ją więc łatwo rozszerzyć o człon warunkowy, umożliwiający opuszczanie podprogramu w kilku miejscach; niekiedy można podobnie rozbudować makroinstrukcję (7.57a) - rys 7.24 b [16]:
ZESPÓL PGM 2
|
W = < K. |
B, C > |
(7. |
Ul co P) |
|
W = < K, |
C >. |
(7. |
58b) |
A.; if Xc then PUSH Aj + 1 and go to Aj; A.: if xc then POP;
a)
U
PUSH Aj.!
—Aj
Aj.•) <g,- POP
n
Ak
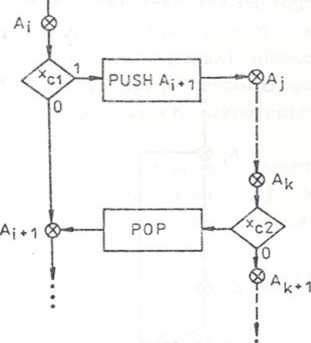
Rys. 7.24. Przykładowe zespoły obsługi podprogramów (15)
Z wymienionych czterech mikroinstrukcji można jeszcze utworzyć dwa inne zespoły.
Drugim, obok podprogramu. rodzajem obsługi powtarzających się fragmentów mikroprograrou jest pętla (rys. 7.23 b). Pętle można
Podzielić na dwa typy: w pierwszym - o powtórzeniu lub wyjściu z pętli cecyduje warunek, zmieniany przy którymś z kolei obiegu pętli; w drugim liczba obiegów pętli jest z góry zadana.
Pętle pierwszego typu można budować za pomocą mikroinstrukcji Podstawowych, na przykład (7.30) lub (7.35 b) - rys. 7.25 a, jeśli Jednak układ sterujący zawiera stos (do realizacji podprogramów), celowe jest użycie go, gdyż upraszcza to adresowanie.
Jeśli powrót do początku pętli odbywa się za pomocą operacji POP to adres tego początku znika ze stosu w chwili skoku i powinien być tam od n°wa wpisywany (°USH) na początku każdego nowego obiegu. Przy
Wyszukiwarka
Podobne podstrony:
0027 Slajd WIDOKI, PRZEKROJE I KŁADY Przedmioty o powtarzających się fragmentach zarysunzr V*VłVłV«
strona039 3.9. PRZEDMIOTY O POWTARZAJĄCYCH SIĘ FRAGMENTACH ZARYSÓW 39 Przedmioty mające płaszczyznę
CCI20111111�050 nika P na styk E (rys. 3-23). Wówczas przerwie się dopływ prądu do cewki, ale w utwo
Rys. 6.39. Wymiarowanie powtarzających się elementów przedmiotów oraz grup elementów 6.3.9. Wymiarow
56 3. Metodologia badań własnych niu materiału z 23 przypadków, kiedy zauważyłam powtarzanie się pew
ROZTRZĄSANIA I ROZBIORY miejsce i nawracających jak refren fragmentów tekstu. Powtarzają się opisy
skanuj0085 Komórka sieciowa - równoległościan zawierający najmniejszy powtarzający się periodycznie
c Rys. 1.5.5.23. Oprawy niedzielone odmian TNP i TNN Rozróżnia się odmiany (serie) opraw
Zdjęcie0482 walec o promieniu r = lm toczy się bez poślizgu po poziomej płaszczyźnie (rys. 23). Dana
Obsługa i naprawa Audi (202) 3. SILNIKI WYSOKOPRĘŻNE Rys. 3.23. ŚCIĄGANIE KOŁA ZĘBATEGO Z WAŁKA POMP
Obsługa i naprawa Audi (41) 2. SILNIKI BENZYNOWE Rys. 2.23. W CELU SPUSZCZENIA PŁYNU CHŁODZĄCEGO ODŁ
23.RYS HISTORYCZNY KSZTAł TOWANIA SIE METOD NAUCZANIA +nauczanie rysunku: 1. Eymont: -podstawa dział
82892 ullman040 (2) 86 2 MODELOWANIE BAZ DANYCH mie z rys. 2.23. A nasza przykładowa cncja Królik Ro
W Niemczech wykonuje się belki ze środnikiem falistym ze sklejki, tzw. belki Hessa (rys. 3.23). Zast
b) Graniastosłup wycięto trzema płaszczyznami a, /3 i y (rys. 57b). Wykrój bryły składa się z fragme
więcej podobnych podstron