1614980e0035368394010h5465164 n
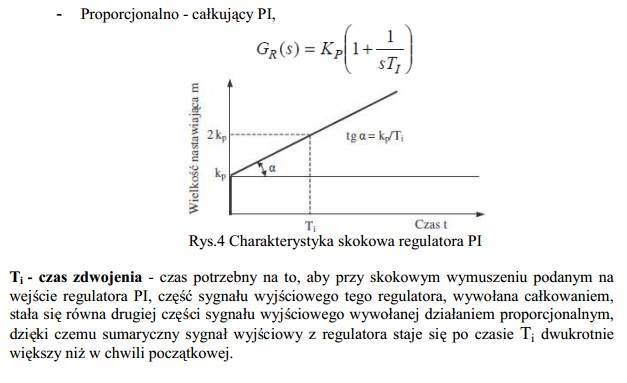
Proporcjonalno - całkujący PI,

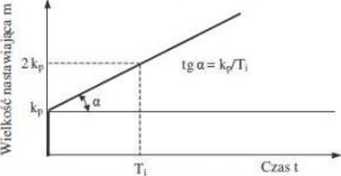
Rys.4 Charakterystyka skokowa regulatora PI
Tj - c/as zdwojenia - czas potrzebny na to, aby przy skokowym wymuszeniu podanym na wejście regulatora PI, część sygnału wyjściowego tego regulatora, wywołana całkowaniem, stała się równa drugiej części sygnału wyjściowego wywołanej działaniem proporcjonalnym, dzięki czemu sumaryczny sygnał wyjściowy z regulatora staje się po czasie Tj dwukrotnie większy niż w chwili początkowej.
Wyszukiwarka
Podobne podstrony:
Rys. 5.1 Charakterystyki skokowe regulatorów: a) regulator P, b) regulator PI charakterystyk skokowy
out 0074 30 30 Rys 3.5. Charakterystyka czasowa regulatora PI. cyjncgo pasywnego czwórnika RC o funk
Modelowanie matematyczne przelewu burzowego... 2167H, m Rys. 4. Charakterystyka hydrauliczna regulat
7 Dzia anie PI Działanie proporcjonalno-całkujące (PI) Ogólne oznaczenie Realizacja elektroniczna Cz
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID. Akademia Górniczo-Hutnicza im.
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Analiza odpowiedzi Poniżej krotka anal
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID. W powyższym rysunku pominięto wyznacz
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Sygnał wyjściowy 2 pozycyjny - PWM Ćwi
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Realizacja PID przy wyjściu PWM Ćwicze
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Wnioski Zastosowany regulator realizuj
więcej podobnych podstron