424 425
424 Programowanie dynamiczne
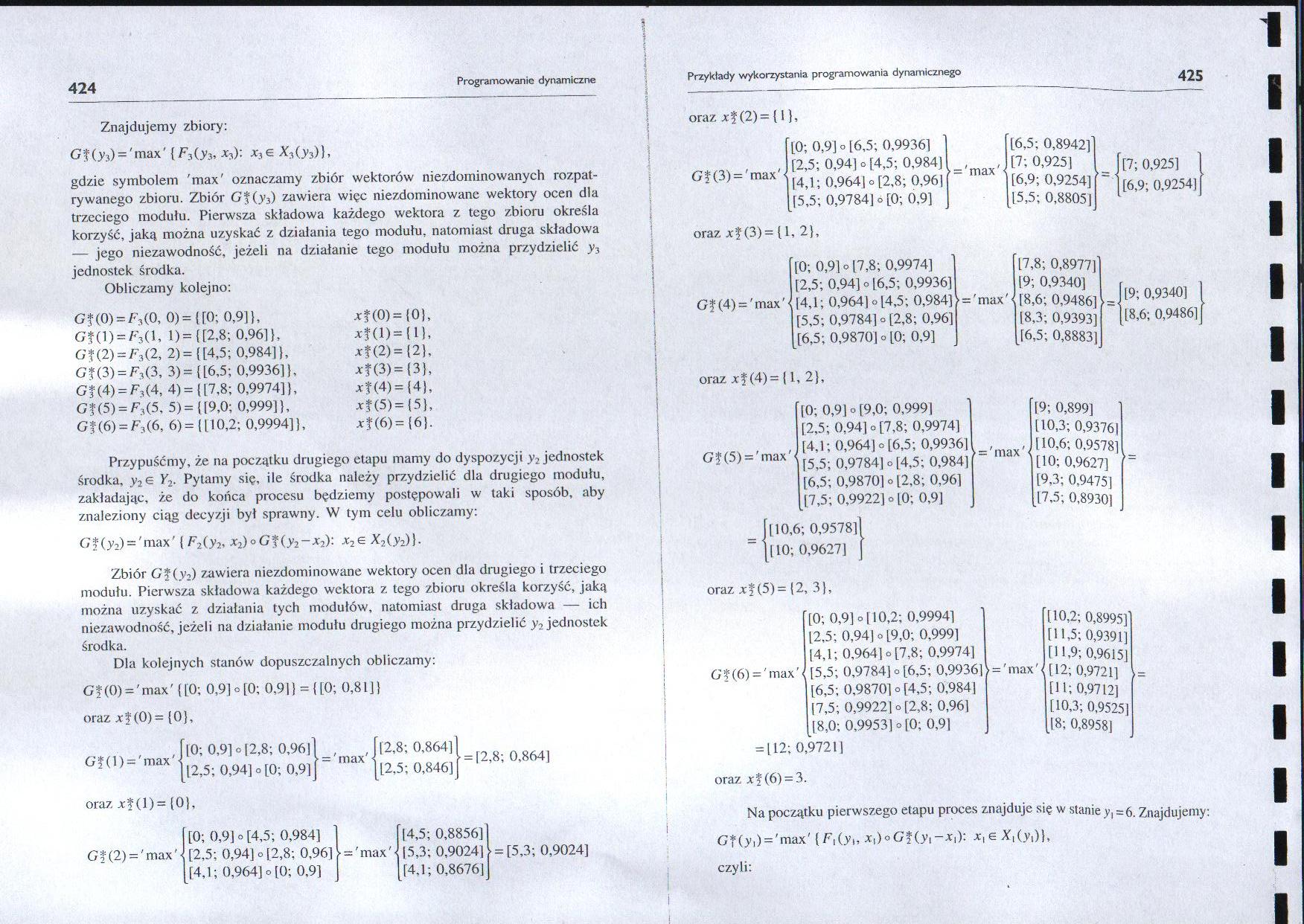
Znajdujemy zbiory:
G?(y3) = 'max' {F3(y3, x3): x3e X3(y3)),
gdzie symbolem 'max' oznaczamy zbiór wektorów niezdorninowanych rozpatrywanego zbioru. Zbiór G*(y3) zawiera więc niezdominowane wektory ocen dla trzeciego modułu. Pierwsza składowa każdego wektora z tego zbioru określa korzyść, jaką można uzyskać z działania tego modułu, natomiast druga składowa — jego niezawodność, jeżeli na działanie tego modułu można przydzielić y, jednostek środka.
Obliczamy kolejno:
x?(0)={0],
jc?(2)={2], jef (3) = {3}, •*?(4)={4), jcf(5)= {5}, Jtf(6)={6}.
Gf(0) = /'\(0, 0) = {[0; 0,9]},
Gf(l) = F3(l, 1)= {[2,8; 0,961], G’t(2) = F3(2, 2) ={[4,5; 0,984|}, Gf(3) = F3(3, 3)={L6,5; 0,9936]}, G*(4) = F3(4, 4) = {[7,8; 0,9974]}, G?(5) = F,(5, 5) = {[9,0; 0,999]}, G* (6) = F,(6, 6) ={[10,2; 0,9994]},
Przypuśćmy, że na początku drugiego etapu mamy do dyspozycji y2 jednostek środka, y2e Y2. Pytamy się, ile środka należy przydzielić dla drugiego modułu, zakładając, że do końca procesu będziemy postępowali w taki sposób, aby znaleziony ciąg decyzji był sprawny. W tym celu obliczamy:
Ctf(y2) = 'm&x' { F2(y2, x2)°Gf(y2-x2): x2e X2(y2)).
Zbiór Gf (y2) zawiera niezdominowane wektory ocen dla drugiego i trzeciego modułu. Pierwsza składowa każdego wektora z. tego zbioru określa korzyść, jaką można uzyskać z działania tych modułów, natomiast druga składowa — ich niezawodność, jeżeli na działanie modułu drugiego można przydzielić y2 jednostek środka.
Dla kolejnych stanów dopuszczalnych obliczamy:
Gf(0) = 'max' {[0; 0,9]o[0; 0,9|) ={|0; 0,81]} oraz (0)= {0},
G* (l) = 'max'
j[0; 0,9] o [2,8; 0,96]1 {[2,5; 0,94] o [0; 0,9]J
=' max'
f [2,8; 0,864] 1 {[2,5; 0,846] (
= [2,8; 0,864]
oraz jc?(1)= {0},
|
[0; 0,9] o [4,5; 0,984] |
(4,5; 0,8856] | ||
|
Gf(2) = 'max'- |
[2,5; 0,94] o [2,8; 0,961 [4,1; 0,964] o [0; 0,9] |
• = 'max'- |
[5,3; 0,9024] [4,1; 0,8676] |
= [5,3; 0,9024]
oraz x$(2) = {I},
Gf (3) = 'max'<
10; 0,9] o [6,5; 0,99361 [2,5; 0,941 o [4,5; 0,984j | 14,1; 0,964| o [2,8; 0,961 [5,5; 0,9784] o [0; 0.9]
= niax
[6,5; 0,8942]1 [?; 0,925] [_J [7; 0,925]
[6,9; 0,9254] 15,5; 0,8805|
[6,9; 0,9254]
oraz xf(3)=[l, 2],
G?(4) = 'max’<
|
[0; 0,9] o 17,8; 0,9974] |
[7,8; 0,8977] | |
|
[2,5; 0,94] o 16,5; 0,9936] |
|9; 0,9340] | |
|
[4,1; 0,964] o 14,5; 0,984] |
> = 'max'‘ |
[8,6; 0,94861 |
|
[5,5; 0,97841 o [2,8; 0,96] |
18,3; 0,9393] | |
|
[6,5; 0,98701 o [0; 0,9] |
[6,5; 0,8883] |
[9; 0,9340] [8,6; 0,9486]
oraz xj(4)= (1, 2),
GJ(5) = 'max'<
|
[0; 0,9] o [9,0; 0,9991 |
[9; 0,899] | |
|
[2,5; 0,94] o [7,8; 0,9974] |
[10,3; 0,9376| | |
|
[4,1; 0,964] o [6,5; 0,9936| |
> =' max' < |
[10,6; 0,9578] |
|
[5,5; 0,97841 o [4,5; 0,9841 |
[10; 0,9627] | |
|
[6,5; 0,9870] o 12,8; 0,961 |
[9,3; 0,9475] | |
|
[7,5; 0,9922] o [0; 0,9] |
17,5; 0,89301 |
[10,6; 0,957811 [10; 0,9627] J
oraz xf(5) = (2, 3],
[0; 0,9] o 110,2; 0,99941 [2,5; 0,94| o [9,0; 0,9991 [4,1; 0,9641 o [7,8; 0,9974]
[10,2; 0,8995]' [11.5; 0,9391] [11.9; 0,9615]
Gf (6) = 'max'< [5,5; 0,9784] o [6,5; 0.9936|| = 'maxW [12; 0,9721]
16,5; 0,9870] o [4,5; 0,9841 [7,5; 0,99221 o [2,8; 0,961 18,0; 0,9953] o [0; 0,91 = [12; 0,9721)
[U; 0,9712] [10,3; 0,9525| 18; 0,8958)
> =
oraz x*(6) = 3.
Na początku pierwszego etapu proces znajduje się w stanie y, = 6. Znajdujemy; Gf(y,) = 'max' [F,(y„ z,)oGf(y,-xl): x,e X,(y,)), czyli;
Wyszukiwarka
Podobne podstrony:
404 405 404 Programowanie dynamiczne Dla stanu y3 = 3 mamy odpowiednio: x3 = 0, 3 + 0 - 3 = 0, x3 =
Napisz program, który znajduje wszystkie liczby trzycyfrowe spełniające następujący warunek: „Potroj
3 Studia pierwszego stopnia: ogólne informacje o przedmiotach W programach studiów znajdują się
Narzędzia Java Wszystkie narzędzia potrzebne do programowania w Javie znajdują się w bezpłatnym paki
Programowanie dynamiczne (6 godz) 1. Zasada optymalności Bellmana 2.
DSC00106 (10) WSISiZ BaltKlaOfłracjijM PROGRAMOWANIE DYNAMICZNE Programowanie dynamiczne należy trak
10257844?8236446237815?6601585216239790 o m (v> W PROGRAMOWANIU DYNAMICZNYM DO WYBORY DK Y/JI WYK
w Rzeczpospolitej Polskiej i dziesięciu spotkań na Ukrainie. Program szkolenia znajduje się na stron
o będące ograniczeniami majq postać liniowq. Programowanie liniowe znajduje szerokie zastosowanie w
więcej podobnych podstron