3tom064
2. WYTWARZANIE ENERGII ELEKTRYCZNEJ -130

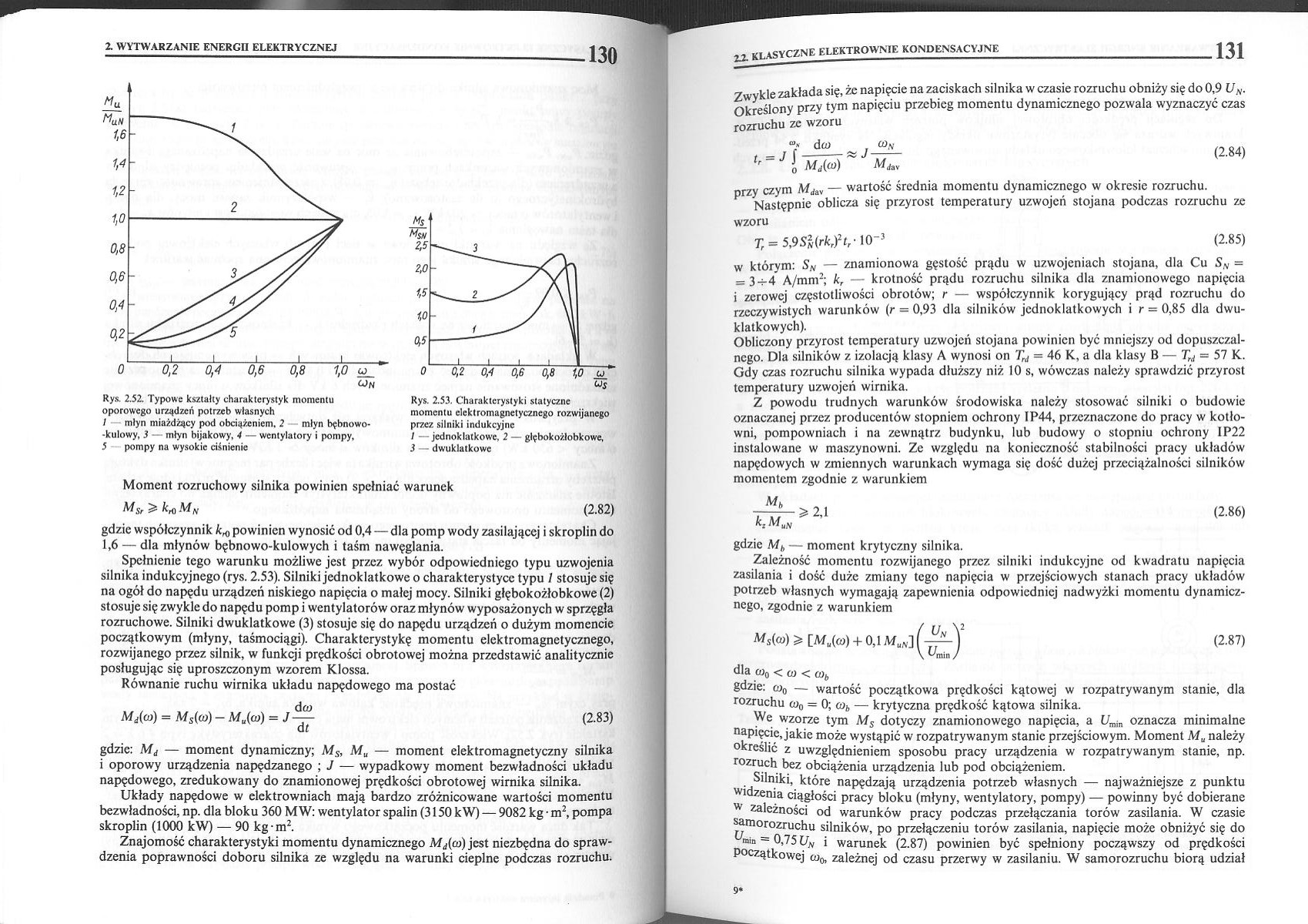
Rys. 2.52. Typowe kształty charakterystyk momentu oporowego urządzeń potrzeb własnych / młyn miażdżący pod obciążeniem. 2 młyn bębnowo--kułowy, 3 — młyn bijakowy, 4 — wentylatory i pompy,
5 pompy na wysokie ciśnienie
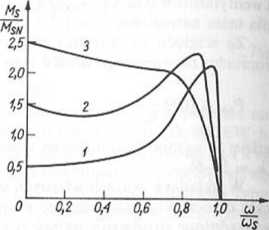
Rys. 2.53. Charakterystyki statyczne momentu elektromagnetycznego rozwijanego przez silniki indukcyjne / —jednokłątkowe. 2 — głębokożłobkowe,
3 - - dwuklatkowc
Moment rozruchowy silnika powinien spełniać warunek
MSr > fc* Mn (2.82)
gdzie współczynnik powinien wynosić od 0,4 — dla pomp wody zasilającej i skroplin do 1,6 — dla młynów bębnowo-kulowych i taśm nawęglania.
Spełnienie tego warunku możliwe jest przez wybór odpowiedniego typu uzwojenia silnika indukcyjnego (rys. 2.53). Silniki jednoklatkowc o charakterystyce typu / stosuje się na ogół do napędu urządzeń niskiego napięcia o małej mocy. Silniki głębokożłobkowe (2) stosuje się zwykle do napędu pomp i wentylatorów oraz młynów wyposażonych w sprzęgła rozruchowe. Silniki dwuklatkowe (3) stosuje się do napędu urządzeń o dużym momencie początkowym (młyny, taśmociągi). Charakterystykę momentu elektromagnetycznego, rozwijanego przez silnik, w funkcji prędkości obrotowej można przedstawić analitycznie posługując się uproszczonym wzorem Klossa.
Równanie ruchu wirnika układu napędowego ma postać
d co
Md(co) = Ms{(0) - Mu(a>) = J— (2.83)
at
gdzie: Md — moment dynamiczny; Ms, M„ — moment elektromagnetyczny silnika i oporowy urządzenia napędzanego ; J — wypadkowy moment bezwładności układu napędowego, zredukowany do znamionowej prędkości obrotowej wirnika silnika.
Układy napędowe w elektrowniach mają bardzo zróżnicowane wartości momentu bezwładności, np. dla bloku 360 MW: wentylator spalin (3150 kW) — 9082 kg • m2, pompa skroplin (1000 kW) — 90 kg m2.
Znajomość charakterystyki momentu dynamicznego Mj(co) jest niezbędna do sprawdzenia poprawności doboru silnika ze względu na warunki cieplne podczas rozruchu.
7 vkie zakłada się, że napięcie na zaciskach silnika w czasie rozruchu obniży się do 0,9 UN. Określony przy tym napięciu przebieg momentu dynamicznego pozwala wyznaczyć czas rozruchu ze wzoru
(Jaj
tr = J !
(2.84)
przy czym M*, — wartość średnia momentu dynamicznego w okresie rozruchu.
P Następnie oblicza się przyrost temperatury uzwojeń stojana podczas rozruchu ze wzoru
Tr = 5,9Sl(rK?tr\0~} (2-85)
w którym: SN — znamionowa gęstość prądu w uzwojeniach stojana, dla Cu SN = = 3^.4" A/mm2; kr — krotność prądu rozruchu silnika dla znamionowego napięcia i zerowej częstotliwości obrotów; r — współczynnik korygujący prąd rozruchu do rzeczywistych warunków (r = 0,93 dla silników jcdnoklatkowych i r = 0,85 dla dwu-klatkowych).
Obliczony przyrost temperatury uzwojeń stojana powinien być mniejszy od dopuszczalnego. Dla silników z izolacją klasy A wynosi on Trd = 46 K, a dla klasy B — Trd = 57 K. Gdy czas rozruchu silnika wypada dłuższy niż 10 s, wówczas należy sprawdzić przyrost temperatury uzwojeń wirnika.
Z powodu trudnych warunków środowiska należy stosować silniki o budowie oznaczanej przez producentów stopniem ochrony IP44, przeznaczone do pracy w kotłowni, pompowniach i na zewnątrz budynku, lub budowy o stopniu ochrony 1P22 instalowane w maszynowni. Ze względu na konieczność stabilności pracy układów napędowych w zmiennych warunkach wymaga się dość dużej przcciążalności silników momentem zgodnie z warunkiem
Mh
k! Mun
(2.86)
gdzie Mb — moment krytyczny silnika.
Zależność momentu rozwijanego przez silniki indukcyjne od kwadratu napięcia zasilania i dość duże zmiany tego napięcia w przejściowych stanach pracy układów potrzeb własnych wymagają zapewnienia odpowiedniej nadwyżki momentu dynamicznego, zgodnie z warunkiem
Ms(o)) [Mu(co) + 0,1 M„n] (-~2) (2.87)
\ ^rain J
dla tOj, < co < coj,
gdzie: co0 — wartość początkowa prędkości kątowej w rozpatrywanym stanie, dla rozruchu ca0 = 0; o)h — krytyczna prędkość kątowa silnika.
We wzorze tym Ms dotyczy znamionowego napięcia, a l/mi„ oznacza minimalne napięcie, jakie może wystąpić w rozpatrywanym stanic przejściowym. Moment M, należy określić z uwzględnieniem sposobu pracy urządzenia w rozpatrywanym stanie, np. rozruch bez obciążenia urządzenia lub pod obciążeniem.
Silniki, które napędzają urządzenia potrzeb własnych — najważniejsze z punktu widzenia ciągłości pracy bloku (młyny, wentylatory, pompy) — powinny być dobierane w zależności od warunków pracy podczas przełączania torów zasilania. W czasie samorozruchu silników, po przełączeniu torów zasilania, napięcie może obniżyć się do min = 0,75 UN i warunek (2.87) powinien być spełniony począwszy od prędkości Początkowej zależnej od czasu przerwy w zasilaniu. W samorozruchu biorą udział
9*
Wyszukiwarka
Podobne podstrony:
3tom061 2 WYTWARZANIE ENERGII ELEKTRYCZNEJ 124 Rys. 2.47. Charakterystyka uniwersalna młyna misowo-r
3tom067 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 136 Rys. 2.58. Schemat układu elektrycznego elektrowni z
3tom063 Z WYTWARZANIE ENERGII ELEKTRYCZNEJ 128 Oznacza to, że punktowi 1 charakterystyki App(Gp) prz
3tom046 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 94 Rys. 110. Uproszczony schemat układu cieplnego bloku
3tom047 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 96 Rys. 2.11. Podział procesu technologicznego klasyczne
3tom055 Z WYTWARZANIE ENERGII ELEKTRYCZNEJ 112 Rys. 2.29. Rozkład ciśnienia p i prędkości pary v ora
3tom056 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 114 Rys. 2.33. Przykładowy przebieg rozprężania pary w t
3tom057 Z WYTWARZANIE ENERGII ELEKTRYCZNEJ 116 Rys. 2.36. Szkic skraplacza powierzchniowego wodnego
3tom060 i 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ i 122 Ł2 v» 1SVCZNE ELEKTROWNIE KONDENSACYJNE 1232.2.6
3tom062 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 126 Tablica 2.16. Podstawowe dane znamionowe pomp stosow
3tom065 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 132 silniki nagrzane do temperatury pracy i dlatego dopu
3tom066 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ134 Na rysunku 2.56 przedstawiono schemat układu elektryc
3tom069 Z WYTWARZANIE ENERGII ELEKTRYCZNEJ140 Do przełączania torów zasilania stosuje się układy aut
3tom070 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 142 Rys. 2.63. Schemat układu buforowego baterii głównej
3tom073 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 148 Rys. 2.68. Obieg upustowo--kondensacyjny w układzie
3tom081 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 164 Rys. 2.78. Podstawowe rodzaje układów cieplnych elek
3tom082 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 166 Rys. 2.81. Osuszanie pary w turbinie za pomocą oddzi
3tom085 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 172 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 172 Rys. 2.85. Ś
3tom087 2. WYTWARZANIE ENERGII ELEKTRYCZNEJ 176 Rys. 2.88. Układy wielomaszynowe w elektrowniach pom
więcej podobnych podstron