3tom194
5. ELEKTROENERGETYKA PRZEMYSŁOWA 390
dobór liczby pracujących transformatorów do obciążenia oraz wyłączenie transformatora w czasie zmniejszonego poboru mocy, np. podczas niecałkowicie obsadzonej zmiany;
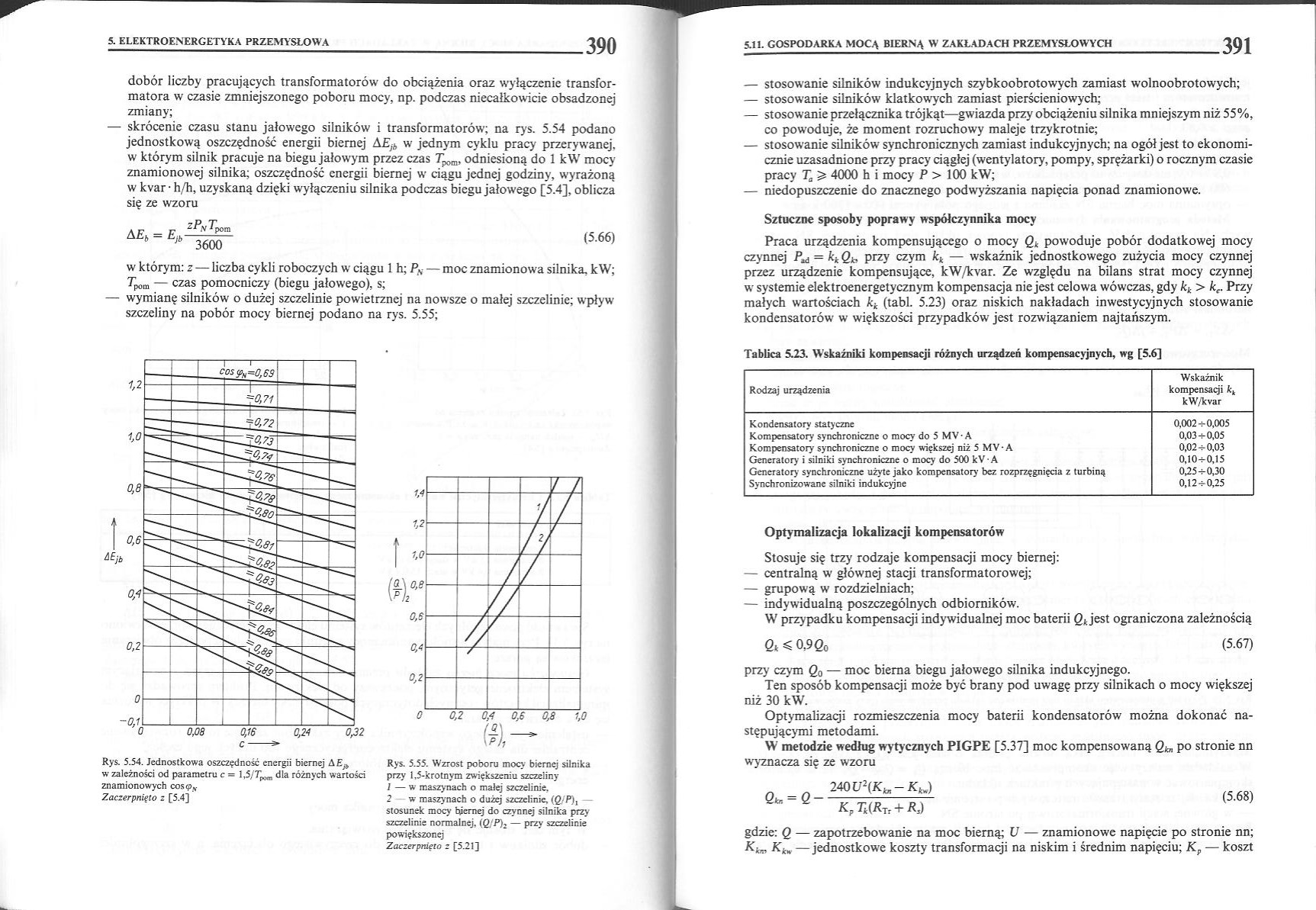
— skrócenie czasu stanu jałowego silników i transformatorów; na rys. 5.54 podano jednostkową oszczędność energii biernej AEjb w jednym cyklu pracy przerywanej, w którym silnik pracuje na biegu jałowym przez czas 7^, odniesioną do 1 kW mocy znamionowej silnika; oszczędność energii biernej w ciągu jednej godziny, wyrażoną w kvar- h/h, uzyskaną dzięki wyłączeniu silnika podczas biegu jałowego [5.4], oblicza się ze wzoru
A Eb = EJb
zPyTpom
3600
(5.66)
w którym: z—liczba cykli roboczych w ciągu 1 h; Ps — moc znamionowa silnika, kW; Tpom — czas pomocniczy (biegu jałowego), s;
— wymianę silników o dużej szczelinie powietrznej na nowsze o małej szczelinie; wpływ szczeliny na pobór mocy biernej podano na rys. 5.55;
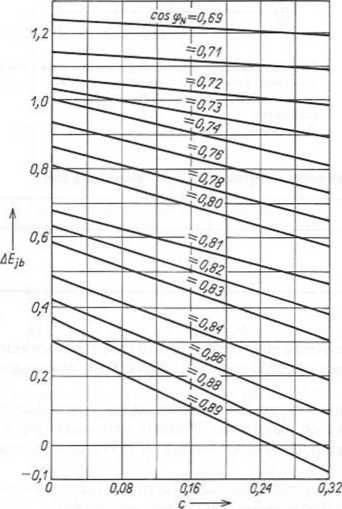
Rys. 5.54. Jednostkowa oszczędność energii biernej A E# w zależności od parametru c = 1,5/7^ dla różnych wartości znamionowych cos <ps Zaczerpnięto z [5.4]

Rys. 5.55. Wzrost poboru mocy biernej silnika przy 1,5-krotnym zwiększeniu szczeliny
1 — w maszynach o małej szczelinie.
2 w maszynach o dużej szczelinie, (g/P), stosunek mocy biernej do czynnej silnika przy szczelinie normalnej. (g/P)> — przy szczelinie powiększonej
Zaczerpnięto z [5.21]
— stosowanie silników indukcyjnych szybkoobrotowych zamiast wolnoobrotowych;
— stosowanie silników klatkowych zamiast pierścieniowych;
— stosowanie przełącznika trójkąt—gwiazda przy obciążeniu silnika mniejszym niż 55%, co powoduje, że moment rozruchowy maleje trzykrotnie;
— stosowanie silników synchronicznych zamiast indukcyjnych; na ogół jest to ekonomicznie uzasadnione przy pracy ciągłej (wentylatory, pompy, sprężarki) o rocznym czasie pracy Ta > 4000 h i mocy P > 100 kW;
— niedopuszczenie do znacznego podwyższania napięcia ponad znamionowe.
Sztuczne sposoby poprawy współczynnika mocy
Praca urządzenia kompensującego o mocy Qk powoduje pobór dodatkowej mocy czynnej Pió — kk Qk, przy czym kk — wskaźnik jednostkowego zużycia mocy czynnej przez urządzenie kompensujące, kW/kvar. Ze względu na bilans strat mocy czynnej w systemie elektroenergetycznym kompensacja nie jest celowa wówczas, gdy kk > ke. Przy małych wartościach kk (tabl. 5.23) oraz niskich nakładach inwestycyjnych stosowanie kondensatorów w większości przypadków jest rozwiązaniem najtańszym.
Tablica 5.23. Wskaźniki kompensacji różnych urządzeń kompensacyjnych, wg [5.6]
|
Rodzaj urządzenia |
Wskaźnik kompensacji kk kW/kvar |
|
Kondensatory statyczne |
0,002-7-0,005 |
|
Kompensatory synchroniczne o mocy do 5 MV • A |
0,03+0,05 |
|
Kompensatory synchroniczne o mocy większej niż 5 MV-A |
0,02*0,03 |
|
Generatory i silniki synchroniczne o mocy do 500 kV • A |
0,10+0,15 |
|
Generatory synchroniczne użyte jako kompensatory bez rozprzęgnięcia z turbiną |
0,25+0,30 |
|
Synchronizowane silniki indukcyjne |
0,12*0,25 |
Optymalizacja lokalizacji kompensatorów
Stosuje się trzy' rodzaje kompensacji mocy biernej:
— centralną w głównej staqi transformatorowej;
— grupową w rozdzielniach;
— indywidualną poszczególnych odbiorników.
W przypadku kompensacji indywidualnej moc baterii Qk jest ograniczona zależnością
QkśO,9Q0 (5.67) przy czym Q0 — moc bierna biegu jałowego silnika indukcyjnego.
Ten sposób kompensacji może być brany pod uwagę przy silnikach o mocy większej niż 30 kW.
Optymalizacji rozmieszczenia mocy baterii kondensatorów można dokonać następującymi metodami.
W metodzie według wytycznych PIGPE [5.37] moc kompensowaną Qk„ po stronie nn wyznacza się ze wzoru
(5.68)
240 UHK^-K,,) KpTk(RlT + Rs)
gdzie: Q — zapotrzebowanie na moc bierną; U — znamionowe napięcie po stronie nn; Kkr, Kkw —jednostkowe koszty transformacji na niskim i średnim napięciu; Kp — koszt
Wyszukiwarka
Podobne podstrony:
3tom193 5. ELEKTROENERGETYKA PRZEMYSŁOWA Wpływ kompensacji mocy biernej na wielkość transformatora n
3tom190 5. ELEKTROENERGETYKA PRZEMYSŁOWA 382 2. Dla każdego z otrzymanych podzbior
3tom191 5. ELEKTROENERGETYKA PRZEMYSŁOWA 384Sc
3tom192 5. ELEKTROENERGETYKA PRZEMYSŁOWA 386 5. ELEKTROENERGETYKA PRZEMYSŁOWA 386 Rys. 5.46. Zależno
3tom196 5. ELEKTROENERGETYKA PRZEMYSŁOWA 394 — układem zasilania i wewnętrznego ro
3tom197 5. ELEKTROENERGETYKA PRZEMYSŁOWA 396 5. ELEKTROENERGETYKA PRZEMYSŁOWA 396 a." of cc a.”
3tom181 5. ELEKTROENERGETYKA PRZEMYSŁOWA 364 Wyznaczanie zapotrzebowania na energię Zmienność obciąż
3tom186 5. elektroenergetyka przemysłowa 374 Rys. 5.34. Układ widłowy W do zasilania stacji z. jedny
Olej maszynowy ŁMS-80 stosowany jest m.in. do smarowania łożysk pracujących przy dużych obciążeniach
-6- b) zwiększenie liczby bodźców docierających do kierowcy oraz liczby
3tom187 5. ELEKTROENERGETYKA PRZEMYSŁOWA 376 Metoda obliczeniowa wyznaczenia liczby i lokalizacji st
3tom195 .392 5. ELEKTROENERGETYKA PRZEMYSŁOWA jednostkowy strat mocy; Tk — czas użytkowania baterii;
IMAG0221 Wnioski z zasad rozbudowy powłok elektronowych W miarę zwiększania się liczby atomowej powt
Politechnika PoznańskaInstytut Elektrotechniki i Elektroniki Przemysłowej Zakład Techniki Świetlnej
SSL25108 W jaki sposób elektrony są : przekazywane na NADP+? 1) Bezpośredni transfer ze związku o ba
page0163 124 VIII. Górnictwo I przemysł TABL. I. ROZMIESZCZENIE PRZEMYŚLU NA PODSTAWIE LICZBY ZATRUD
więcej podobnych podstron