CCI20111111�170
15.
MASZYNY ELEKTRYCZNE STOSOWANE W URZĄDZENIACH AUTOMATYKI
15.1. Silniki elektryczne malej mocy
W urządzeniach automatyki szerokie zastosowanie znalazły silniki elektryczne małej mocy na prąd stały lub przemienny. Zasada działania tych silników jest ta sama co i poznanych już silników większych mocy, różnią się one jednak budową. Dostarczana do tych silników energia elektryczna jest swego rodzaju sygnałem
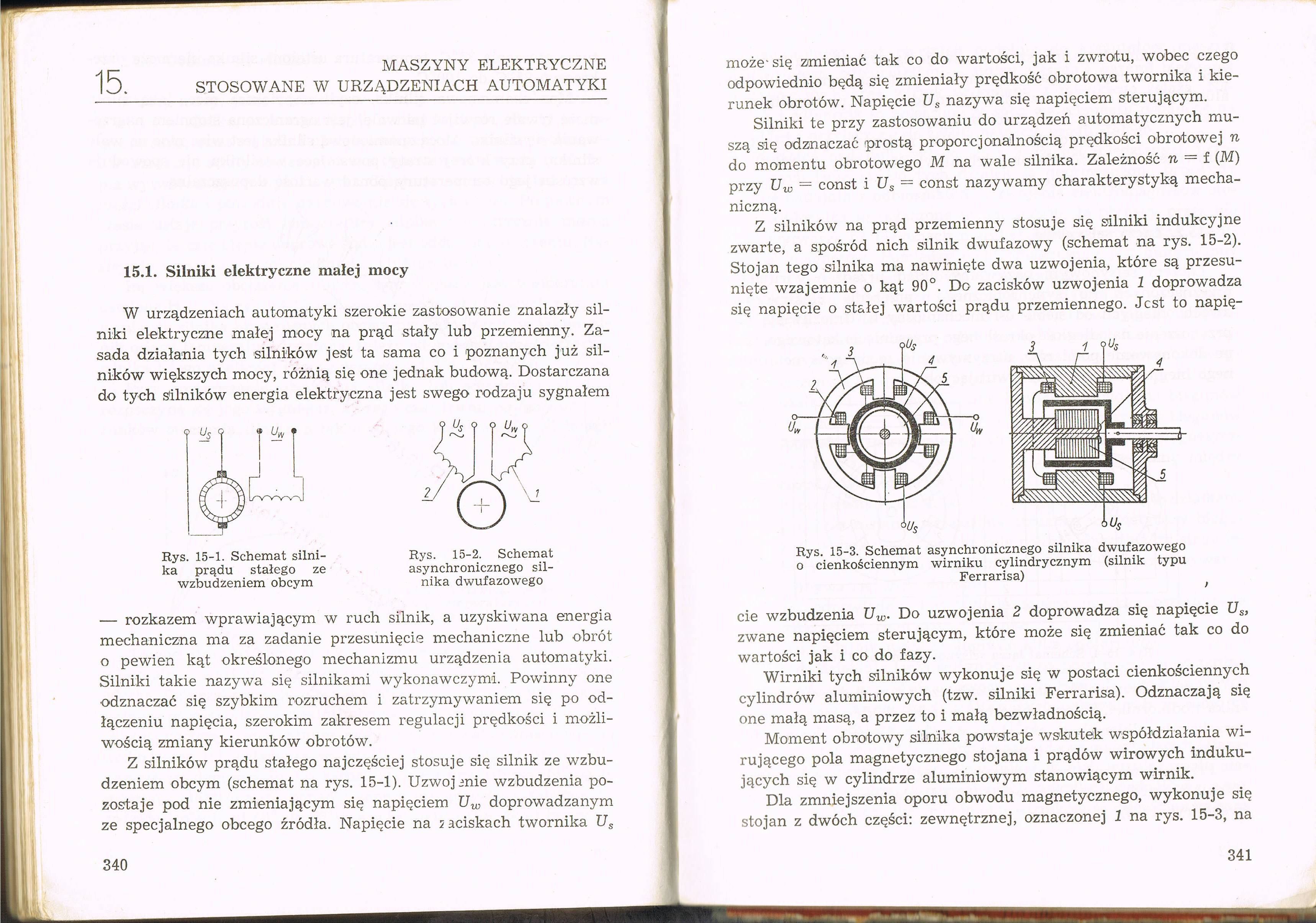
Rys. 15-1. Schemat silnika prądu stałego ze wzbudzeniem obcym
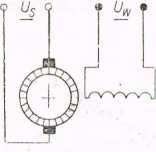
Rys. 15-2. Schemat asynchronicznego silnika dwufazowego
— rozkazem wprawiającym w ruch silnik, a uzyskiwana energia mechaniczna ma za zadanie przesunięcie mechaniczne lub obrót o pewien kąt określonego mechanizmu urządzenia automatyki. Silniki takie nazywa się silnikami wykonawczymi. Powinny one odznaczać się szybkim rozruchem i zatrzymywaniem się po odłączeniu napięcia, szerokim zakresem regulacji prędkości i możliwością zmiany kierunków obrotów.
Z silników prądu stałego najczęściej stosuje się silnik ze wzbudzeniem obcym (schemat na rys. 15-1). Uzwój mie wzbudzenia pozostaje pod nie zmieniającym się napięciem Uw doprowadzanym ze specjalnego obcego źródła. Napięcie na naciskach twornika Us może- się zmieniać tak co do wartości, jak i zwrotu, wobec czego odpowiednio będą się zmieniały prędkość obrotowa twornika i kierunek obrotów. Napięcie Us nazywa się napięciem sterującym.
Silniki te przy zastosowaniu do urządzeń automatycznych muszą się odznaczać prostą proporcjonalnością prędkości obrotowej n do momentu obrotowego M na wale silnika. Zależność n = f (M) przy Uw = const i Us = const nazywamy charakterystyką mechaniczną.
Z silników na prąd przemienny stosuje się silniki indukcyjne zwarte, a spośród nich silnik dwufazowy (schemat na rys. 15-2). Stojan tego silnika ma nawinięte dwa uzwojenia, które są przesunięte wzajemnie o kąt 90°. Do zacisków uzwojenia 1 doprowadza się napięcie o stałej wartości prądu przemiennego. Jest to napię-
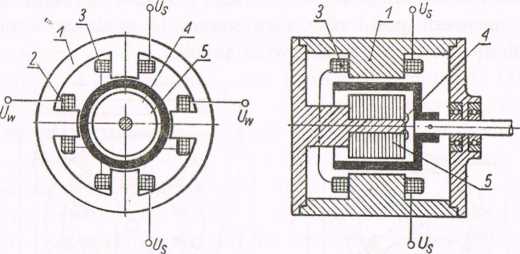
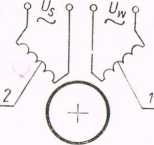
Rys. 15-3. Schemat asynchronicznego silnika dwufazowego o cienkościennym wirniku cylindrycznym (silnik typu Ferrarisa)
cie wzbudzenia Uw. Do uzwojenia 2 doprowadza się napięcie Us, zwane napięciem sterującym, które może się zmieniać tak co do wartości jak i co do fazy.
Wirniki tych silników wykonuje się w postaci cienkościennych cylindrów aluminiowych (tzw. silniki Ferrarisa). Odznaczają się one małą masą, a przez to i małą bezwładnością.
Moment obrotowy silnika powstaje wskutek współdziałania wirującego pola magnetycznego stojana i prądów wirowych indukujących się w cylindrze aluminiowym stanowiącym wirnik.
Dla zmniejszenia oporu obwodu magnetycznego, wykonuje się stojan z dwóch części: zewnętrznej, oznaczonej 1 na rys. 15-3, na
341
Wyszukiwarka
Podobne podstrony:
CCI20111111�151 Prąd rozruchu silników nawet małej mocy nie powinien przekraczać cztero- do sześciok
urządzeń automatyki sterowania i kontroli stosowanych w systemie elektroenergetycznym. InzA_U01 Tl A
15 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 16. Rozruch sil. za pomocą Powerboss
15. MODELE MATEMATYCZNE MASZYN ELEKTRYCZNYCH PRĄDU PRZEMIENNEGO Wprawdzie maszyny elektryczne s
Zarys rozwoju projektowania maszyn elektrycznych 15 Duże trudności napotkali projektanci maszyn prąd
2tom115 5. MASZYNY ELEKTRYCZNE 232 15 s w przypadku maszyn o mocy do 1000 kW (kV A), a dla maszyn wi
być zakłady produkujące maszyny i urządzenia elektroenergetyczne, zakłady naprawy maszyn elektryczny
90 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) magnetycznej urządzeń „automotive" t
4. MATERIAŁ NAUCZANIA4.1. Zasada działania urządzeń i maszyn elektrycznych4.1.1.
DEFINICJA MASZYNY ELEKTRYCZNEJ •tii Maszyna elektryczna: urządzenie do elektromechanicznego
CCI20101212�014 15 Na wartość siły wykrawania mają wpływ siły pochodzące od czynności pomocniczych.
CCI20101218�014 15 1.10. Ciągadła i trzpienie ciągarskie Ciągadła są to narzędzia do realizowania pr
Aspekty rozwoju małych maszyn elektrycznych 71 Dopracowanie technologii automatycznej produkcji siln
Warunki stosowania urządzeń elektrycznych, w tym opraw oświetleniowych o określonych klasach
CCI20110114�014 15 Przy walcowaniu blach i taśm stosunek D/h, jest znacznie większy od jedności. Wów
3tom107 3. SIECI ELEKTROENERGETYCZNE 216 Numeracja wtórna (maszynowa) jest stosowana podczas oblicze
565 2 15.3. ENERGETYKA WIATROWA15.3.5. Regulacja mocy turbiny wiatrowej W odróżnieniu od elektrowni
więcej podobnych podstron