Image 11

16
się względem przedmiotu manipulowanego - robot jest programowany we współrzędnych zewnętrznych (np. kaitezjańskich). Strukturę robota II generacji przedstawia rys. 1.6 (wg. [4,15,45]).
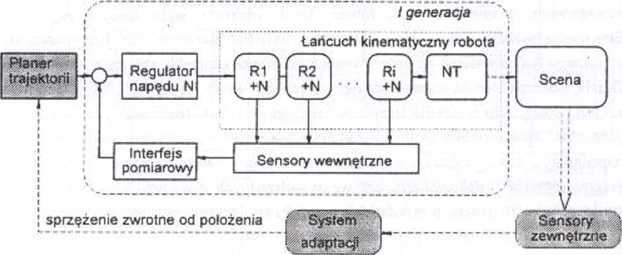
Rys. 1.6. Struktura robota II generacji. Rl, R2,..., Ri, N, NT - jak wyżej. Szarym kolorem oznaczono elementy charakterystyczne dla robotów II generacji
W stosunku do robotów I generacji układy sterowania są tu wyposażone w tzw. system adaptacji i_planer trajektorii. Do zadań planera trajektorii należy określenie współrzędnych pośrednich programowanej trajektorii, tzn. współrzędnych ruchu leżących pomiędzy położeniem początkowym a końcowym trajektorii RP, z uwzględnieniem zadanego przez programistę kształtu trajektorii. Z kolei system adaptacji ma za zadanie dostosowanie zachowania RP do aktualnego, postrzeganego przez sensory zewnętrzne stanu otoczenia w kilku wybranych, wskazanych przez programistę sytuacjach (np. w sytuacji wykrycia prawdopodobieństwa kolizji, pustych magazynów wejściowych itp.) typowych. Dostosowanie to może polegać na:
zatrzymaniu robota, wygenerowaniu odpowiedniego komunikatu do operatora i oczekiwaniu na jego reakcję związaną np. z usunięciem przyczyny zaistaniałego stanu (np. usuniecie przeszkody, zapełnienie magazynu wejściowego lub jego opróżnienie itp.) i ponownym uruchomieniu robota;
- wygenerowaniu komunikatu (błędu) z równoczesnym wywołaniem z pamięci US i realizacji odpowiedniej sekwencji programowej (przygotowanego wcześniej podprogramu, np. podprogramu "ucieczki", powodującego wycofanie się robota
Wyszukiwarka
Podobne podstrony:
str 7 I Ki Ilayrfni 11 In te lecz przedmiotem zapisu nie jest ani pojawienie się Sarace-nów, ani ic
str 7 I Ki Ilayrfni 11 In te lecz przedmiotem zapisu nie jest ani pojawienie się Sarace-nów, ani ic
str 7 I Ki Ilayrfni 11 In te lecz przedmiotem zapisu nie jest ani pojawienie się Sarace-nów, ani ic
Scan10248 W razie ujawnienia się wad przedmiotu sprzedaży sprzedawca jest odpowiedzialny względem ku
czas drastycznego obchodzenia się z owadami. Przedmiotem zabawy badawczej jest więc także przyroda
OMiUP t2 GorskiA1 kontrolowane czujnikiem 23, zawory 9 i 11 zamykają się. Następnie zostaje uruchomi
img098 (11) r ma się cel do środków, których pożądamy ze względu na cel. A stąd jest oczywiste, że p
22451 Obraz (11) I 16 syczna stara się jc wyznaczyć na gruncie dociekań teoretycznych, semantyka kog
image 11 (2) O, jak mi obrzydł len siary dziadyga, którym się stałem. Czego ode mnie chce ta pała ły
Statystyka Liczba punktów ECTS 3 Kod przedmiotu 11.2-16-01 -B/14 Kierunek: Politologia Godzin
Informatyka Liczba punktów ECTS dz. - 1, z. - 2 Kod przedmiotu 11.9-16-00-A/02 Kierunek:
Obraz (11) I 16 syczna stara się jc wyznaczyć na gruncie dociekań teoretycznych, semantyka kognitywn
313 (11) 16 Specyfika nawigacji pilotowej 313 Nawigatorzy korzystający z odbiorników GPS i ECDiS pow
16. Treści merytoryczne przedmiotu Omawiane zagadnienia koncentrują się wokół tradycyjnych metod
str 11 Kto używa kielni, a kto hebla? Przyjrzyj się narysowanym przedmiotom i wpisz do diagramu nazw
więcej podobnych podstron