Image 155
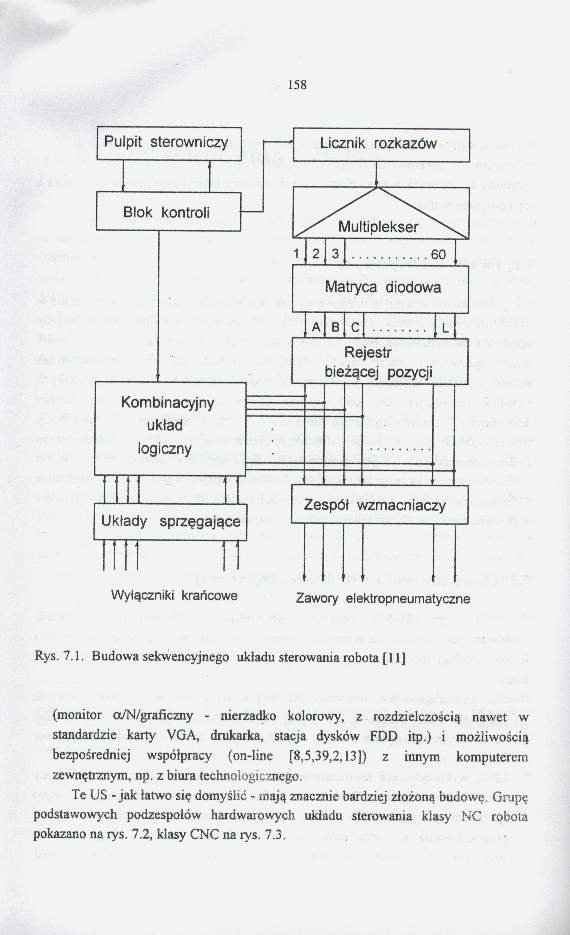
158
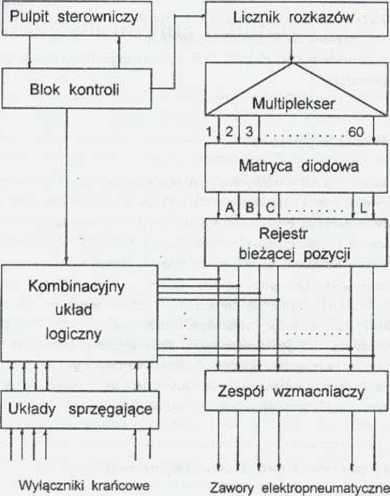
Rys. 7.1. Budowa sekwencyjnego układu sterowania robota [11J
(monitor ot/N/graficzny - nierzadko kolorowy, z rozdzielczością nawet w standardzie karty VGA, drukarka, stacja dysków FDD itp.) i możliwością bezpośredniej współpracy (on-line [8,5,39,2.13]) z innym komputerem zewnętrznym, np. z biura technologicznego.
Te US - jak łatwo się domyślić - mają znacznie bardziej złożoną budowę. Grupę podstawowych podzespołów hardwarowych układu sterowania klasy N'C robola pokazano na rys. 7.2, klasy CNC na rys. 7.3.
Wyszukiwarka
Podobne podstrony:
Rys. 4. Schemat ideowy układu sterowania
Rys. 3.6. Budowa i działanie układu przeciwpoślizgowego ASR. kJŁm □ ak J G G Temperatura
Sterowanie dyskretne pracą *0,coi j j Rys Fig Odpowiedź układu sterowania na zakłócenie i przebiegi
Scan30005 Rys. 9.28. Projektowanie układu sterowania wiertarki oraz przyrządu mocującego i przemiesz
Obsługa i naprawa Audi (215) 1 3 Rys. 4.6. CZĘŚCI HYDRAULICZNEGO UKŁADU STEROWANIA
Obsługa i naprawa Audi (217) 17 1615 Rys. 4.7. CZĘŚCI MECHANICZNEGO UKŁADU STEROWANIA SPRZĘGŁEM I &n
Image 142 145 Rys. 6.8. Budowa optycznego przetwornika zliczającego (29). lt2 - pole widzenia fotoel
11 Rys. 1.5. Budowa wykresu układu dwuskładnikowego bez rozpuszczalności składników w stanie stałym
Wiedza, baza danych Percepcja Komendy Rysunek: Schemat układu sterowania robota mobilnego (interakcj
Rys. 3.36. Sekwencja ujęć pracy robota RV-2AJ firmy Mitsubishi podczas mieszania probówek Źródło:
026 3 26 Sterowanie logiczne i sekwencyjne start slup Rys. 3.2. Schemat logiczny układu włączania z
Modelowanie układu sterowania nawijarki taśmy stalowej 67 Rys. 2. Blok formuły programu LabView do w
Modelowanie układu sterowania nawijarki taśmy stalowej 69 Rys. 6. Przebiegi wielkości symulowanych t
Modelowanie układu sterowania nawijarki taśmy stalowej 67 Rys. 2. Blok formuły programu LabView do w
Modelowanie układu sterowania nawijarki taśmy stalowej 69 Rys. 6. Przebiegi wielkości symulowanych t
więcej podobnych podstron