Image 70

74
ad a)
Są to urządzenia elektryczne złożone i drogie, głównie dzięki konieczności wykorzystywania drogich elektronicznych przetworników częstotliwości, stosowanych do regulacji częstotliwości napięcia zasilania. Znalazły one zastosowanie głównie w RP o udźwigu powyżej 40 kg. Schemat działania silnika asynchronicznego 2-fazowego przedstawiono na rys. 3.30 (27,14,28].
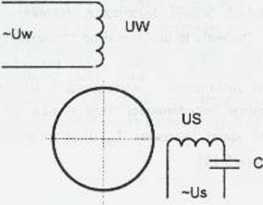
Rys. 3.30. Silnik asynchroniczny
W stojanie znajdują się:
UW - uzwojenie wzbudzenia,
US - uzwojenie sterowania.
UW i US są usytuowane wzajemnie pod kątem 90°.
UW jest zasilane z sieci prądu zmiennego ~Uw, US jest zasilane zmiennym napięciem ~Us przesuniętym w fazie względem ~Uw o ±90° (dzięki zastosowanej pojemności C). Napięcie prądu zmiennego ~Uw jest stałe co do wartości, zaś -Us jest zmienne, gdyż jest to wielkość sterowana (jego źródłem jest układ sterowania robota), ad b)
Napęd składa się z silnika elektrycznego synchronicznego i przekształtnika ze sterowaniem zależnym od kąta obrotu wirnika. Rysunek 3.31 przedstawia schemat blokowy sterowania prędkością obrotową silnika synchronicznego.
Prędkość kątowa wału silnika zależy od wartości częstotliwości prądu sterującego (zasilającego) silnik.
Mimo małej sprawności nie przekraczającej 25% silniki te ze względu na takie ich korzystne cechy, jak:
- wysoka trwałość, ograniczona jedynie trwałością łożysk wirnika;
- minimalne opory ruchu;
Wyszukiwarka
Podobne podstrony:
6 (1944) Baterie słoneczne AGH Baterie słoneczne - są to urządzenia elektroniczne, które wykorzystuj
IMG$74 58. Wymienniki ciepła. Wymienniki ciepła są to urządzenia, których zadaniem jest przekazywani
1tom329 13. ELEKTROTERMIA 660 Konstrukcja urządzeń rezystancyjnych pośrednich komorowych Są to urząd
- Tcnsonietry są to urządzenia mierzące naprężenia w materiale metoda elektryczną. Miarą natężenia j
skanuj0392 15Hamulce15.1. Klasyfikacja i charakterystyka hamulców Hamulce są to urządzenia służące d
Image(824) Układ pozapmmtdow Są to oirodkł potikorowt ♦ droQ ?* WMtutct impulsach zMązauą z T*$uUc)ą
skanowanie0201 Załącznik 2.1 Karta pracy Na kartce narysowane są różne urządzenia elektryczne.0 © Do
CCF20101206�002 Wstęp prenowania rolnicze są to urządzenia melioracyjne zakładane najczęściej na zwi
ZEGAREKELEKTRONICZNY Zegar elektroniczny to urządzenie elektroniczne, które wyświetla czas
Hamulce są to urządzenia służące do zatrzymywania układu napędowego, utrzymywania go w stałym
DSC00201 (5) Rozjazdy kolejowe Rozjazdy tołejowf są to urządzenia, które umozkwiają przejazd pojazdó
wymagane przez te narządy znajdują się w zakresach od -10 do 5°C. Są to urządzenia uniwersalne, posi
więcej podobnych podstron