Image 89
92
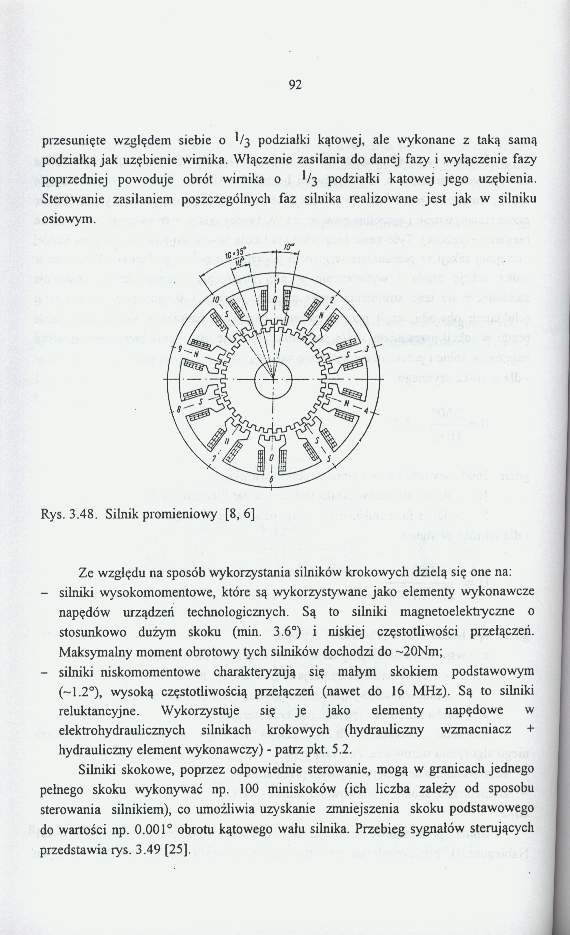
przesunięte względem siebie o I/3 podzialki kątowej, ale wykonane z taką samą podzialką jak uzębienie wirnika. Włączenie zasilania do danej fazy i wyłączenie fazy poprzedniej powoduje obrót wirnika o I/3 podzialki kątowej jego uzębienia. Sterowanie zasilaniem poszczególnych faz silnika realizowane jest jak w silniku osiowym.
Rys. 3.48. Silnik promieniowy [8, 6]
Ze względu na sposób wykorzystania silników krokowych dzielą się one na:
- silniki wysokomomentowe, które są wykorzystywane jako elementy wykonawcze napędów urządzeń technologicznych. Są to silniki magnetoelektryczne o stosunkowo dużym skoku (min. 3.6°) i niskiej częstotliwości przełączeń. Maksymalny moment obrotowy tych silników dochodzi do -20Nm;
- silniki mskomomentowe charakteryzują się małym skokiem podstawowym (-1.2°), wysoką częstotliwością przełączeń (nawet do 16 MHz). Są to silniki reluktancyjne. Wykorzystuje się je jako elementy napędowe w elektrohydraulicznych silnikach krokowych (hydrauliczny wzmacniacz + hydrauliczny element wykonawczy) - patrz pkt. 5.2.
Silniki skokowe, poprzez odpowiednie sterowanie, mogą w granicach jednego pełnego skoku wykonywać np. 100 miniskoków (ich liczba zależy od sposobu sterowania silnikiem), co umożliwia uzyskanie zmniejszenia skoku podstawowego do wartości np. 0.001° obrotu kątowego wału silnika. Przebieg sygnałów sterujących przedstawia rys. 3.49 (25).
Wyszukiwarka
Podobne podstrony:
skanuj0003 (394) 65 Ćwiczenie 6 kierunkach i o przesuniętych względem siebie fazach o kąt jt. W okre
G -► Gąsienice — wycinamy paski 50 i 50a. sklejamy je razem, lekko przesuwając względem si
61 (147) pozwala na dowolne przesunięcie względem siebie kątowych fa: otwarcia okienek dolotowych i
DSC00166 (18) Sposoby układania papy na dachu • Styki pasów papy należy przesuwać względem siebie
14636 SDC13026 tycznych przesuniętych względem siebie o 90°. Każda para biegunów ma własne uzwojenia
biofizyka 3 4. Zjawiska elekirokinetyczne. Polegają one na przesunięciu względem s
G wach) - części 46 I 46a, sklejamy ze sobą w ten sposób, że przesuwamy je względem siebie
Gdy jedno ciało styka się z drugim, to przesuwaniu tych ciał względem siebie sprzeciwia się siła tar
skan060 (2) Ćwiczenie nr 7 Str. 21. Wstęp teoretyczny Przesuwanie się warstw cieczy względem siebie
image 092 92 Szyki antenowe liniowe i planarne Wybór wielomianu Czebyszewa wydaje się być naturalny.
więcej podobnych podstron