mech2 18
•fcf
!M
l yt
^podstawieniu otrzymanych wislkośol mamy zatem (jg!j Vg*«= 0,29 • 50,0 e 8,7 cm/e; vę = 0,29 * 36,1 = 10,5 oa/a.
|lf®«ktar ~yZ ma kierunek prostopadły do odcinka CPlp, a jego zwrot jest
jjjgggt CiS\i » u -®-0
|«:»KOdny-‘* obrotem członu AB względeo ?AB*
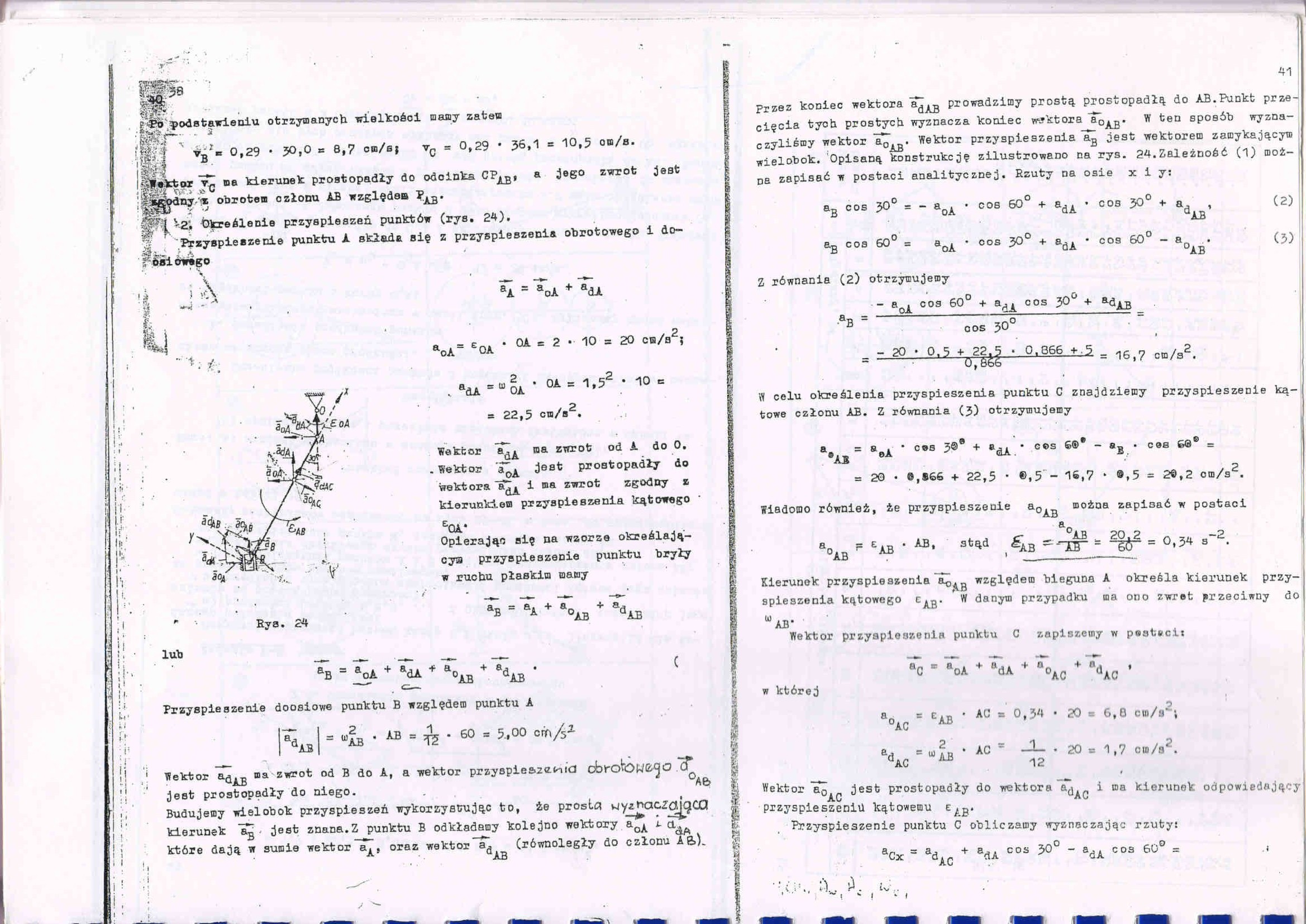
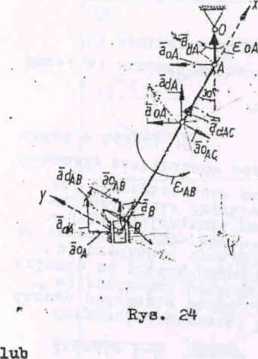
V2; Określenie przyspieszeń punktów (rys. 24).
Przyspieszenie punktu A składa się z przyspieszenia obrotowego i do-rŚaiowsgo
) v:
X
loA
+ a
di.
loA
OA
QA
2 • 10 = 20 cm/s ; -2
dA
OA
OA = 1,5
= 22,5 cm/s •
10
Wektor ma zwrot od A do 0. Wektor 'a^A jest prostopadły do wektora ~a^ i ma zwrot zgodny z kierunkiem przyspieszenia kątowego
ł0A*
Opierając się na wzorze określającym przyspieszenie punktu bryły w ruchu płaskim mamy
A
AB
JAB
" _oA VAB “AB
Przyspieszenie doosiowe punktu B względem punktu A
= ^ ~ X ' ^0 = 5,00 cm
Wektor ma zwrot od B do A, a wektor przyspieszeń i O obrotowego cT
jest prostopadły do niego. .
Budujemy wielobok przyspieszeń wykorzystując to, że prosta ^yz^acząigCCI kierunek "ajj . jest znana.Z punktu B odkładamy kolejno wektory i.
które dają w sumie wektor a., oraz wektor a. (równoległy do członu Aft).
A' °AB
l
przez koniec wektora prowadzimy prostą prostopadłą do AB.Punkt przecięcia tych prostych, wyznacza koniec wektora W ten sposób wyzna
czyliśmy wektor a1^R. Wektor przyspieszenia a^ jest wektorem zamykającym wielobok. Opisaną konstrukcję zilustrowano na rys. 24.Zależność (1) możne zapisać w postaci analitycznej. Rzuty na osie x i y:
|
Hg COS |
5°° = " aoA ' |
• cos 60° + Edjl • |
cos 30° + a. , |
(2) |
|
aAB | ||||
|
Eg COS |
8 0 n » 0 >■ |
' COS 30° + adA ■ |
cos 60 - a„ °AB |
(5) |
Z równania (2) otrzymujemy
- aoA cos 60° + a^A cos }0U + ad^jj ■Sb " cos 30°
= - 20 ' ł0flŁ| - 0'866 = 16,7 c»/a2.
W celu określenia przyspieszenia punktu C znajdziemy przyspieszenie kątowe członu AB. Z równania (3) otrzymujemy
a = a ®A3
eA
c®s 3® + 1
dA .
ces &Be =
= 20 • ©,®6G + 22,3 • ®,5 - 16,7 1 ®,5 = 2®,2 cm/s2.
Wiadomo również, że przyspieszenie można zapinać w postaci
ac
aoA0 F EAB ' Afl1 stf1d (^B 'TT ~ ^ = °»34 s~2-
Kierunek przyspieszenia względem bieguna A określa kierunek przy
spieszenia kątowego c Ag. W danym przypadku ma ono zwret przeciwny do
AB1
U)
Wektor przyspieszenia punktu C zapiszemy w poat&cit
w której
JAC
AB
AC s 0,54 • 20 = 6,0 cm/s1 ;
'dAC = "AB
AC
12
Wektor jest prostopadły do wektora i ma kierunek odpowiadający
przyspieszeniu kątowemu e^g.
. 'Przyspieszenie punktu C obliczamy wyznaczając rzuty:
AC
MA
dA
11
a~i + + a„ + n.
C oA dA oAC dAC
Wyszukiwarka
Podobne podstrony:
10413 Untitled Scanned 41 (3) Podstawiając do równań (A) mamy: 4~X,=aEJ; 3±3f2=0;
25 (59) 9. WAŁY MASZYNOWE KSZTAŁTOWE Po podstawieniu otrzymanych wartości do wzoru (2.18) otrzymujem
Image4 C 5 Układ okresowy pierwiastków 18 2 He Widok Podstawowe informacje Rozpowszechnienie Kalkula
Skrypt PKM 1 00141 282 Podstawiając otrzymamy Cwy = 199,8 [N]. Odpowiedź: Po włączeniu sprzęgło rozw
img168 2 35 - Na podstawie otrzymanych wyników wykreślić zależność napięcia
Skrypt PKM 1 00129 258 Pisząc ograniczenie na naprężenie zginające 258 po podstawieniu (8.4) otrzymu
img169 169 Podstawiane otrzymane wyrażenie do wzoru na zmianę energii kinetycznej strumienia między
Na podstawie otrzymanych wyników sporządzić krzywą wzorcową i wyznaczyć zawartość kofeiny w próbce
skanuj0015 (62) Zadanie 29. Na podstawie otrzymanych charakterystyk Weil, który regulator był badany
Ekonometria Jasińska i Foryś (18) Hum u/amin /.podstaw ekonometrii Irwpa III Danajcsi macierz Jtd
więcej podobnych podstron