10413 Untitled Scanned 41 (3)

Podstawiając do równań (A) mamy:
4~X,=aEJ; 3±3f2=0;
rozwiązując otrzymamy:
Xi=j aEJ N; X2=0,
Wartości końcowe momentów zginających (rys. 13.41f) określamy zgodnie z ogólnym wzorem (13.4) wg p. 13.2, który przybiera w tym przypadku postać:
M=MiXl + M2X2. (B)
Wykresy sił poprzecznych i podłużnych wykonane zgodnie z zasadami omówionymi w p. 13.2 przedstawione są na rys. 13.41g, h. Z powyższych wykresów widać, że warunki równowagi są spełnione. Przeprowadzimy jeszcze kontrolę zgodności przemieszczeń (por. p. 13.4.4). W tym celu obliczymy np. pionowe przesunięcie punktu A. Przyjmiemy układ podstawowy jak na rys. 13.41i, i obciążymy go siłą P| = l działającą wzdłuż kierunku poszukiwanego przesunięcia. Zastosujemy tu wzór (13.9), w którym będzie A=a, Rt= 1:
11 1 2
Ala= — —• 3,0 • — aEJ- — • 3,0— 1 • «=0,
EJ 2 3 3
czyli rozwiązanie możemy uważać za prawidłowe.
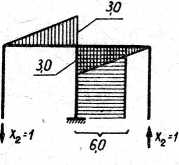
Przykład 13.6. Rozwiązać ramę z przykładu 13.5 (rys. 13.42a) wprowadzając inny układ podstawowy.
Przyjmiemy układ podstawowy jak na rys. 13.42b (por. p. 13.6.5). Wprawdzie bezpośrednio wzdłuż kierunku występowania niewłaściwego wymiaru elementów konstrukcji (odcinek a słupa CF) nie działa żadna z nadliczbowych niewiadomych, ale i w tym przypadku będziemy mogli bez trudności uzyskać rozwiązanie.
Zgodnie ze wzorem (13.35) sumujemy przemieszczenia w układzie podstawowym, wprowadzając wielkości wynikające z montażu tego układu przy użyciu za długiego słupa CF. Przemieszczenia będą
równe:
wzdłuż kierunków działania sił X2:
/fi0=—£Rizł=—Ua+la)=-2a;
|
© |
© | ||
|
k * |
*© i | ||
|
L-30m m **” |
i : | ||
|
6) | |||
|
(5 |
1*30
|
x,’i |
K |
Rys. 13.42
479
Wyszukiwarka
Podobne podstrony:
Image10 (41) 109 Rozwiązania zadań ze zbioru "MENDLA Wyznaczone p podstawimy do równania p V =
Untitled Scanned 41 82 - Rys.3.23. Rysunek do przykładu 1: a) tablica wzbudzeń przerzutnika układu M
Untitled Scanned 48 - 96 - do postaci tablicy Karnaugha - rys.3.32e„ jja podstawie tej tablicy otrzy
Scan Pic0080 obliczamy odległość y obrazu od zwierciadła i podstawiamy do równania zwierciadła. Otrz
Po podstawieniu do równania (6.47) zależności wiążącej napięcie i prąd kondensatora UJs) ,
22827 Untitled Scanned 30 - 60 - Do realizacji danego zadania sterowania nogą być zastosowane różne
16 Otrzymane rozwiązanie całki podstawimy do równania 16 16 g ■ /Cn - Ck*/ rz lz J i - c -
Untitled Scanned 41 C 1.9 Ćwiczenie umiejętności ortograficznych Wyrazy z „ż" Obejrzyj ilustrac
Untitled Scanned 41 105 dowolne elementy zbioru U, to formuły 1-8 będą wyrażać prawdziwe zależności.
Untitled Scanned 41 (X Obouc^e toLtowtfe ópocarufcouśj /na " iO~ 155 Bil/ya qo. %o -- 9,06 kWm
File0033 (2) i podstawiając do równania, po skorzystaniu z tożsamości trygonometrycznych sin (iot ♦
DSC00107 (7) Poszukujemy rozwiązania tego równania w postaci: y(x) = e™. Podstawiając do równania (3
więcej podobnych podstron