mech2 49
4
J
I
i
9G
Dla kół 3 i 4
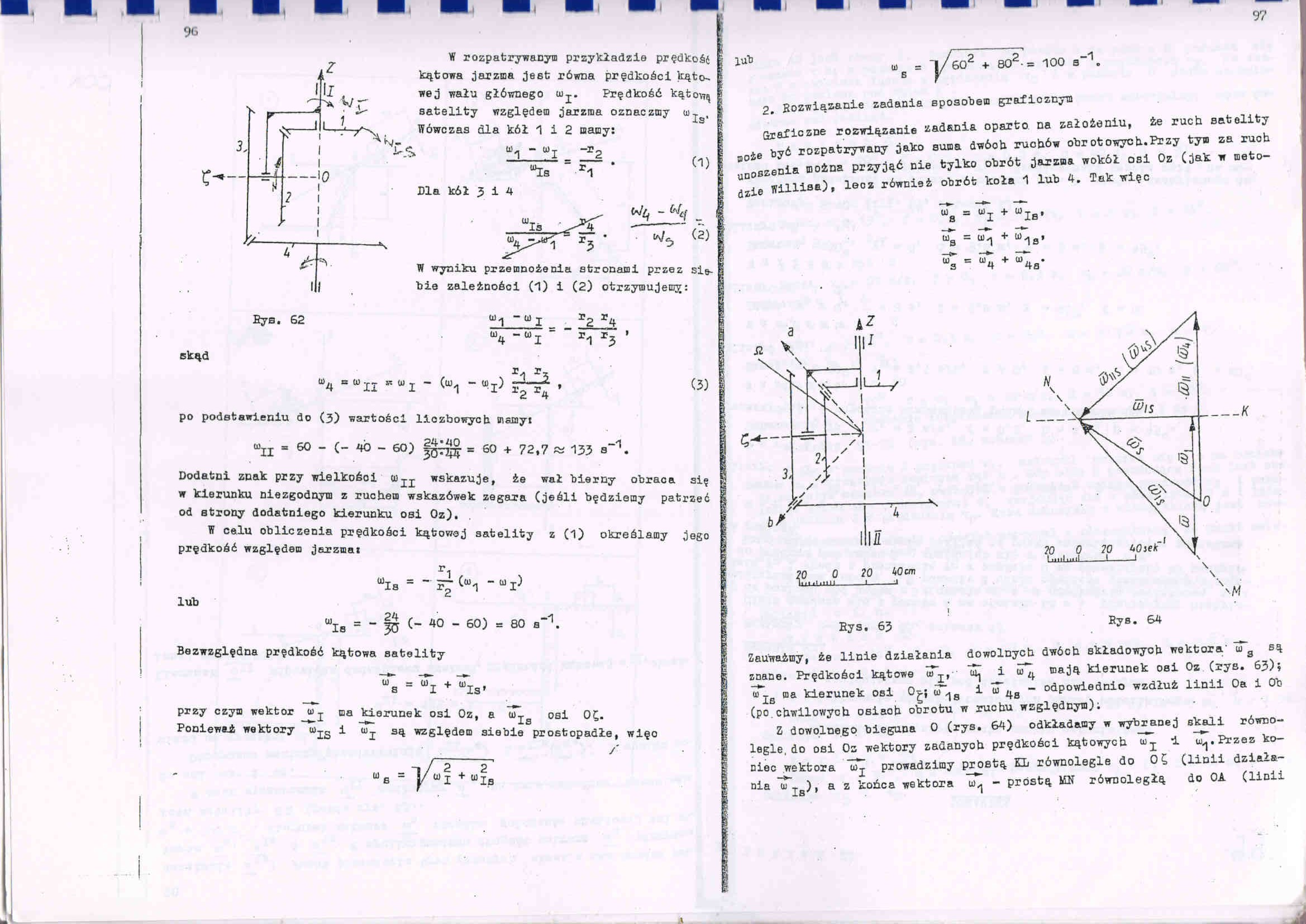
W rozpatrywanym przykładzie prędkośi kątowa jarzma jest równa prędkości kątowej wału głównego uij. Prędkość kątową satelity względem jarzma oznaczmy u>-g. Wówczas dla kół 1 i 2 mamy: m* - U)T
“la

W wyniku przemnożenia stronami przez siebie zależności (1) i (2) otrzymujemy:
- OJ,
Bys. 62
r1 rJ
skąd
JP -C
“4 =WII B“I - (tu1 ““I^ Ą-Ą
(3)
po podstawieniu do (3) wartości liozbowych rnsmyt
“U - 60 - (- 40 - 60) = 60 + 72,7 « 133 a~1.
Dodatni znak przy wielkośoi Uijj wskazuje, że wał bierny obraca się w kierunku niezgodnym z ruchem wskazówek zegara (jeśli będziemy patrzeć od strony dodatniego kierunku osi Oz).
W celu obliczenia prędkości kątowej satelity z (1) określamy jego prędkość względem jarzmai
r1
“t. = - — (u)„ - 0) T)
'2
lub
24 (- 40 - 60) = 80 a"1.
Is = "
Bezwzględna prędkość kątowa satelity
“a = “i + “is*
przy czym wektor w j ma kierunek osi Oz, a u»Is osi 0£. Ponieważ wektory i tuj są względem siebie prostopadłe, więc
-Y
wi+ “ia
2. Rozwiązanie zadania sposobem grafioznym
graficzne rozwiązanie zadania oparto na założeniu, że ruch satelity -oie być rozpatrywany jako suma dwóoh ruchów obr ot owych.Przy tym za ruoh UDoszenia można przyjąć nie tylko obrót jarzma wokół osi Oz (jak w metodzie Willi06), lecz również obrót koła 1 lub 4. Tak więc
“a = "I + uIs<
J1 T "la*
4a*
lub
602 + B02-= 100 3_1,
0).. + U) ,
Eys. 65
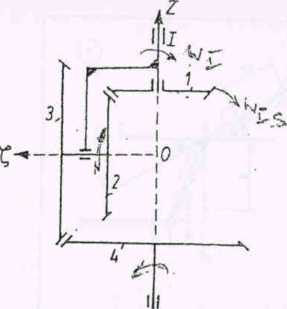
Zauważmy, że linie działania dowolnych dwóch składowych wektora' uTs są znane. Prędkości kątowe uTp lUj i uT^ mają kierunek osi Oz (rys. 63);
ma kierunek osi 0^; uT^g i aT^g - odpowiednio wzdłuż linii Oa i Ob (po chwilowych osiaah obrotu w ruchu względnym);
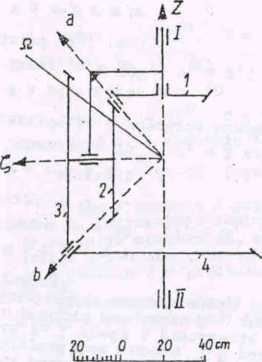
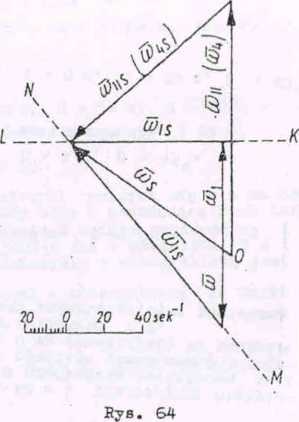
Z dowolnego bieguna O (rys. 64) odkładamy w wybranej skali równolegle, do osi Oz wektory zadanyoh prędkości kątowych 1 u^. Przez koniec wektora prowadzimy prostą KL równolegle do 0£ (linii działa
ła mjs), a z końca wektora u)^ - prostą MN równoległą do OA (linii

Wyszukiwarka
Podobne podstrony:
dla kilku przemieszczanych mas sumaryczna zmiana momentu jest równa: k XAMyp — i.
Dla ułatwienia zakładamy, że P = C (wewnętrzna wartość obligacji jest równa jej cenie rynkowej). Nie
Róv:nanie stanu 53 Przykład 7.4. Wyznaczymy trajektorie dla, rozpatrywanego w przykładzie 7.1, probl
47 (49) 87 Sposób wykorzystania diagramu przedstawiono dla danych z poprzedniego przykładu; ROZWIĄZA
Image194 W rozpatrywanym przykładzie, kolejnym stanom licznika odpowiadają kolejne liczby dwójkowe:
skanuj0096 (27) 172 B. Cieślar Rys. 4.18.2 [kNm] CkN] Sprawdzenie naprężeń dla przyjętej grubości pr
Zdjęcie031 6. Rozpatrujemy zdarzenie -3 < X < -2 Dla którego 7 rozkładów pr»w=dopodobieństvw t
skanuj0013 410 b) Dla Z2=R2 Z = Z ^wel 7 % Zc R, q>4 = arctg-^t. Ostatecznie c) Dla Z2 = jX2
Image590 125 fi. Rezystor R zapewnia ograniczenie prądu do wartości 30 mA. W rozpatrywanym przykładz
powieści i opowiadań dla dorosłych na przykładzie kilku katalogów komputerowych bibliotek publicznyc
więcej podobnych podstron