mechanika100
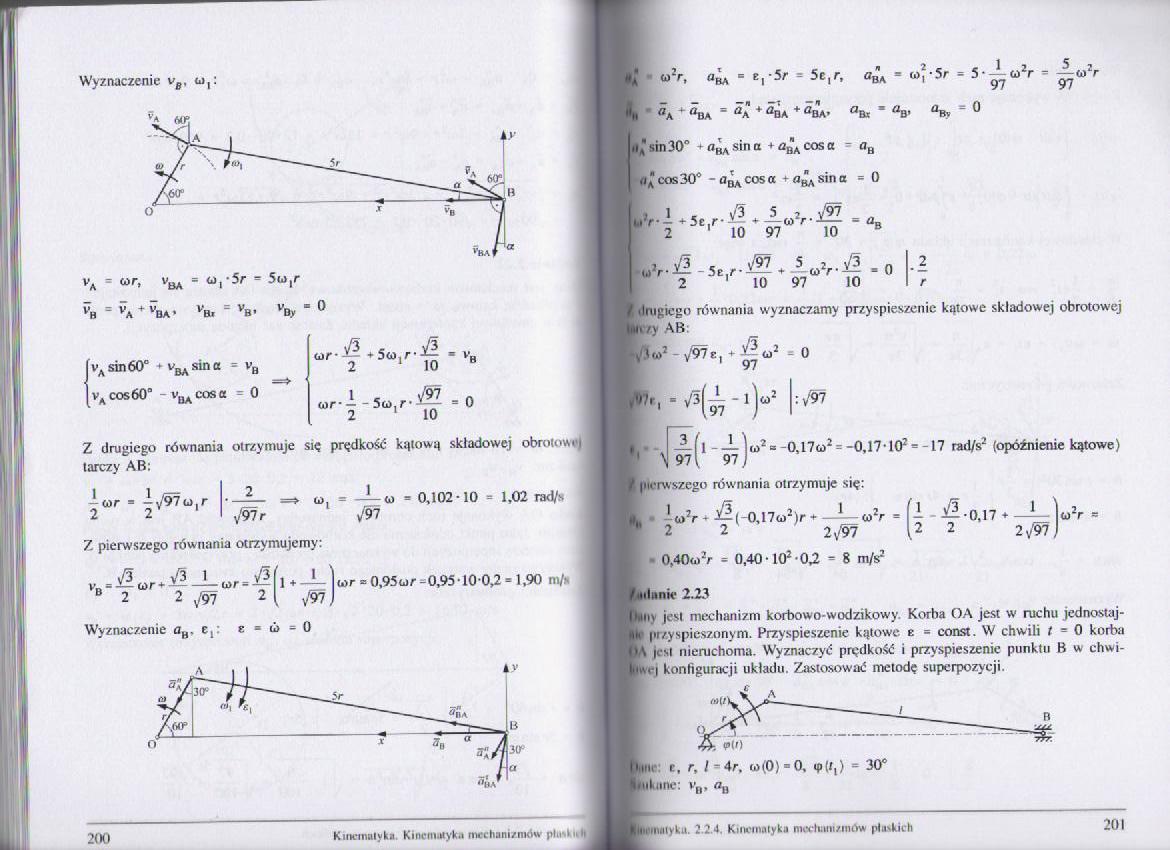
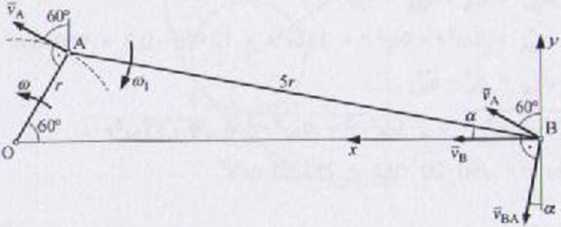
Wyznaczenie vB, <■>,:
|
cor, Vba |
= <*), *5r = 5u,r |
|
VA + VBA * |
ł ii »tf |
Z drugiego równania otrzymuje się prędkość kątowł* składowej obrotowej tarczy AB:
lur = lj97u,r •-?- =*<■>.= —-— w = 0,102-10 = 1,02 iwl/s 2 2V 1 v<97r 1 ^97
Z pierwszego równania otrzymujemy:
v. =^cor*v/3 _Lo>r=^|l +— Lr = 0,95(jr-0,95• 10 0,2 = 1,90 m/i
B 2 2 n/97 2 [ y97 J
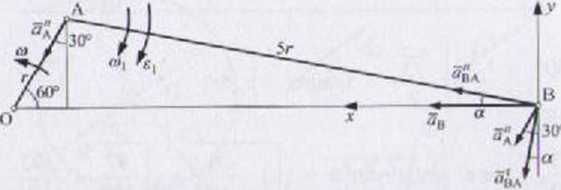
Wyznaczenie aH. e, r. » u> =■ 0
200
Kinematyk* Kinematyka mechim/.mów plusk uh
H UJ<\ - V5r 5c,r, oB\ = ovSr = 5-^u2r = ^j<^r
K ' «A * “ba ■ “A + + °E, * flB' aBv = 0
ii* sin 30° 4 nBA sin a + <2BA cos a - aB
wAcos30° - cos a + a^sina = 0
1,1- v,r3 5 2
fcrr* — + 5e,r* +■—©v*JŁ— = aR
, ^3 . t/§7 5 2 /3 n
«.» r--i— - 5e./*• -- + W7,jl -0
/ •initfiego równania wyznaczamy przyspieszenie kątowe składowej obrotowej li.iwy AB:
97
, l©2-v/97e, + ^?©2 = 0
z*'', - l^97
^|l |a>2« -0,17o2= -0,17-102 = -17 rad/s2 (opóźnienie kątowe)
■ pierwszego równania otrzymuje się:
I*.. * o>7r - 3(J(-Oł17G)2)r + —*—co2r = -- -^•0,17 + —-—)(o:r =
• 0,40©V = 0,40 102- 0,2 = 8 m/s2
/ nianie 2.23
r*|))iin jest mechanizm korbowo-wodzikowy. Korba C)A jest w ruchu jednostajni' przyspieszonym. Przyspieszenie kątowe e ■ const. W chwili t - 0 korba 0\ jest nieruchoma. Wyznaczyć prędkość i przyspieszenie punktu B w chwi-D«“< i konfiguracji układu, Zastosować metodę superpozycji.
v» sin 60° * vBA sin a v,
B
vA cos 60a - vQA cos a = 0
air


Hltiiii c, r, / - 4r. o>(0)»0, «p(fl) = 30°
•".l ane: VB,
brnifliyka. 2.2.4. Kinematyka mochuntzmów ptokich
201
Wyszukiwarka
Podobne podstrony:
mechanika103 Wyznaczenie vB, <*r> VBA = u, *3r = 3cił,i , , _ VA + VBA’ VBe = VB» VBy vA
mechanika103 Wyznaczenie vB, <*r> VBA = u, *3r = 3cił,i , , _ VA + VBA’ VBe = VB» VBy vA
mechanika21 — wyznaczenie współrzędnych punktu A e e e * > ; r*S = ML *A >*A *A5, s, *t (1.87)
mechanika91 Wyznaczenie przyspieszeń punktów B, E, H metody superpozycji: aA = vA(f) = c = 1 m/s2 Sk
Slajd09 out (2) 2 człony ruchome ▲ liczba śr. obrotu: l — vA = vB <-» VAB = VBA KAŻDY Z KAŻDYM !
78834 Slajd09 out (2) 2 człony ruchome ▲ liczba śr. obrotu: l — vA = vB <-» VAB = VBA KAŻDY Z KAŻ
mechanika160 Zasada zachowania energii:£( a) * £( e) =* £A) + Va) e %)ł£A) : m 0+2mg/i ■ -i • 2*ivb
78834 Slajd09 out (2) 2 człony ruchome ▲ liczba śr. obrotu: l — vA = vB <-» VAB = VBA KAŻDY Z KAŻ
Mechanika 7 6) Wyznaczenie średnicy belki. Wartość maksymalna momentu gnącego, odczytana z wykresu M
Do niedawna stosowana była także metoda mechaniczna wyznaczenia powierzchni za pomocą planimetrów. O
. li ■*>, w* 5U.va*^ vXi>J ov*»
PODSTAWOWY PROBLEM MECHANIKI Wyznaczyć równania orbit w zależności od energii całkowitej
PODSTAWOWY PROBLEM MECHANIKI Wyznaczyć równanie orbit w zależności od energii całkowitejE = m 7 —
więcej podobnych podstron