mechanika21
— wyznaczenie współrzędnych punktu A
e e e
* > ;
r*S = ML
(1.87)
5,7-a - Va = «; s«*a - Va 1 w;
v*-ja ■ m;
Nieoznaczony układ równań rozwiązujemy analogicznie do przypadku wypadkowej. Przykładowo, jeśli 5^ * 0. to jedno z rozwiązań ma postać
(1.88)
_ Przestrzenny dowolny układ obciążeń jest w równowadze, jeśli 5 = 0. Af0 = 0, tzn
► ibp* ■ °
5, - 0
<-i
i-1
II
/“t
WE"° — E{V*rp^*JłE«A = 0
i-i j-i
W praktyce stosujemy zapis symboliczny sześciu równań równowagi statycznej (6RRS):
£x-o, £z = o, £z = o, =o, EMr = 0,19°)
42
Statyku Podttawy teoretyczne
I i ' PRZESTRZENNE MODELE KONSTRUKCJI I WYZNACZANIE REAKCJI
■Ifkłóre konstrukcje, m.in. elementy maszyn, można odwzorować za pomocą {MlfMr/cnnycłi modeli fizycznych. Są to schematy statyczne konstrukcji, za-> in<i|*|cc: następujące informacje:
geometrię i położenie ciał sztywnych (brył, powłok, płyt, prętów), l"'łączenia ciał sztywnych ze sobą i z ostoją,
• iKlzaj, położenie i wartość obciążeń czynnych.
Przestrzenne modele konstrukcji przedstawiamy w aksonometrii wr układzie * . Do modelowania połączeń służy więź elementarny, który w przestrzeni no meodkształcalnym prętem prostym, zakończonym przegubami kulistymi Ssmbol więza jest laki sam jak w modelach płaskich. Przegub kulisty pozwala im .brót ciała wokół dowolnej osi przechodzącej przez ten przegub. Więź l'1/rriosi reakcję rozciągającą lub ściskającą.
1'ndpory
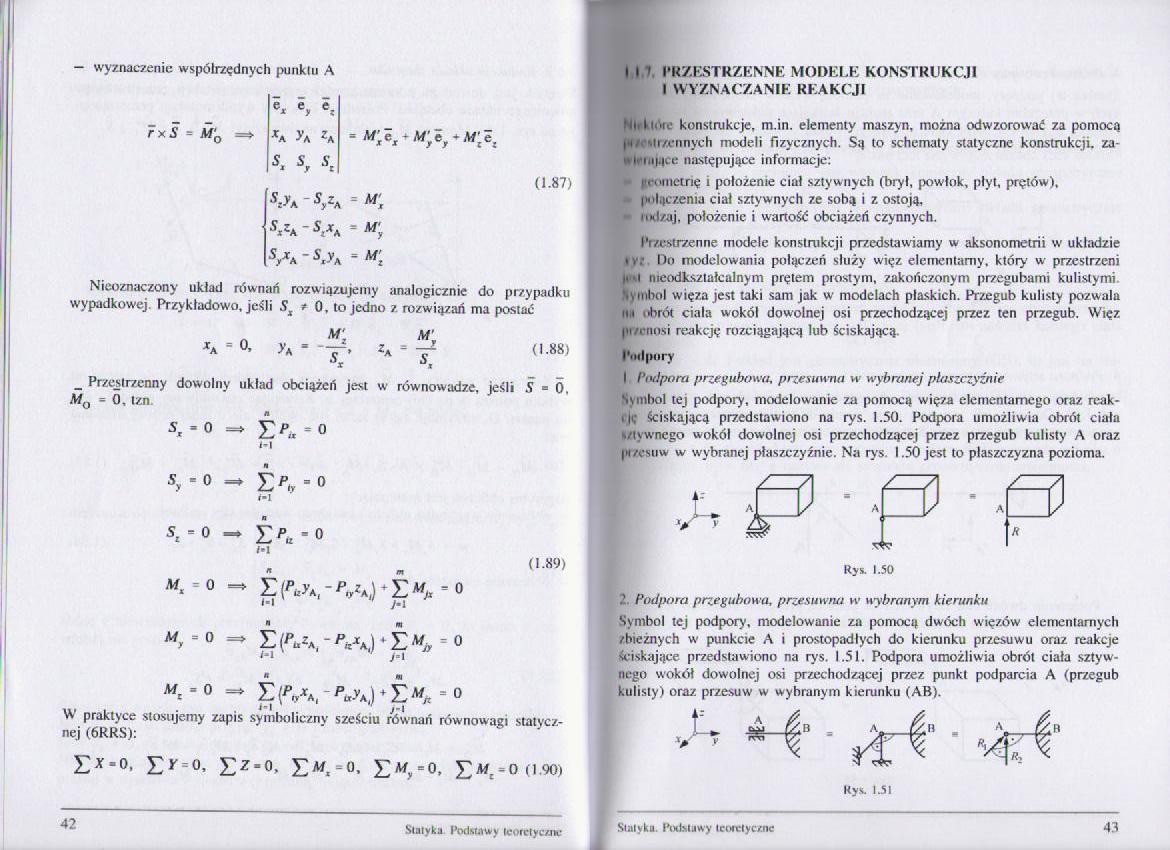
I Pt ni pora przegubowa, przesuwna w wybranej płaszczyźnie Ssmbol tej podpory, modelowanie za pomocą więza elementarnego oraz. reak-<l<; ściskającą przedstawiono na rys. 1.50. Podpora umożliwia obrót ciała s/tywnego wokół dowolnej osi przechodzącej przez przegub kulisty A oraz pi/csuw w wybranej płaszczyźnie. Na rys 1.50 jest to płaszczyzna pozioma.

Rys. 1.50
2. Podpora przegubowa, przesuwna w wybranym kierunku Symbol tej podpor>», modelowanie za pomocą dwóch więzów elementarnych /bieżnych w punkcie A i prostopadłych do kierunku przesuwu oraz reakcje ściskające przedstawiono na rys. 1.51. Podpora umożliwia obrót ciała sztywnego wokół dowolnej osi przechodzącej przez punkt podparcia A (przegub kulisty) oraz przesuw w wybranym kierunku (AB).

Rys. 1.51
43
Statyku, Podstawy tcorctyc/nc
Wyszukiwarka
Podobne podstrony:
IMGP3579 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
8. 5—(2,——) jest środkiem odcinka AB, gdzie A—(— 1 — ,3). Wyznacz współrzędne punktu B. 9.
IMGP3578 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
IMGP3579 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
WYZNACZENIE WSPÓŁRZĘDNYCH PUNKTU P - OBLICZENIA Dane: Pomierzone: A (5405017,38; 4555200,39) B
WYZNACZENIE WSPÓŁRZĘDNYCH PUNKTU PP - OBLICZENIA Dane: Pomierzone: Wyznaczane: P
mechanika100 Wyznaczenie vB, <■>,: cor, Vba = <*), *5r = 5u,r VA + VBA * ł ii »tf Z d
mechanika100 Wyznaczenie vB, <■>,: cor, Vba = <*), *5r = 5u,r VA + VBA * ł ii »tf Z d
mechanika91 Wyznaczenie przyspieszeń punktów B, E, H metody superpozycji: aA = vA(f) = c = 1 m/s2 Sk
Zadanie 3. (2 pkt) Punkt P należy do odcinka o końcach A(-l,-l) i B(7,5). Wyznacz współrzędne punktu
24197 wektory cz 2 13. Dany jest odcinek AB f taki, że A(2; - 5),B(- 4; + 7). Wyznacz współrzędne pu
270 (10) Przykład 5.1.3 W celu wyznaczenia współrzędnych punktu Z, zmierzono odległości d,, rt -,. d
5 biegunowo, wykorzystując oczywiście wcześniej wyznaczone współrzędne punktu 3.Oczywiście punkt 4
geo1 x X2=? X! Y, Y2=? Zad. 2 Obliczenie współrzędnych punktu Wyznaczyć: współrzędne X2, Y2 punktu 2
skanuj0001 (442) 1. RZUTY PROSTOKĄTNE - RZUTY MONGE’ Zadanie 1.1. Mając dane współrzędne punktu A (t
więcej podobnych podstron