270 (10)
Przykład 5.1.3
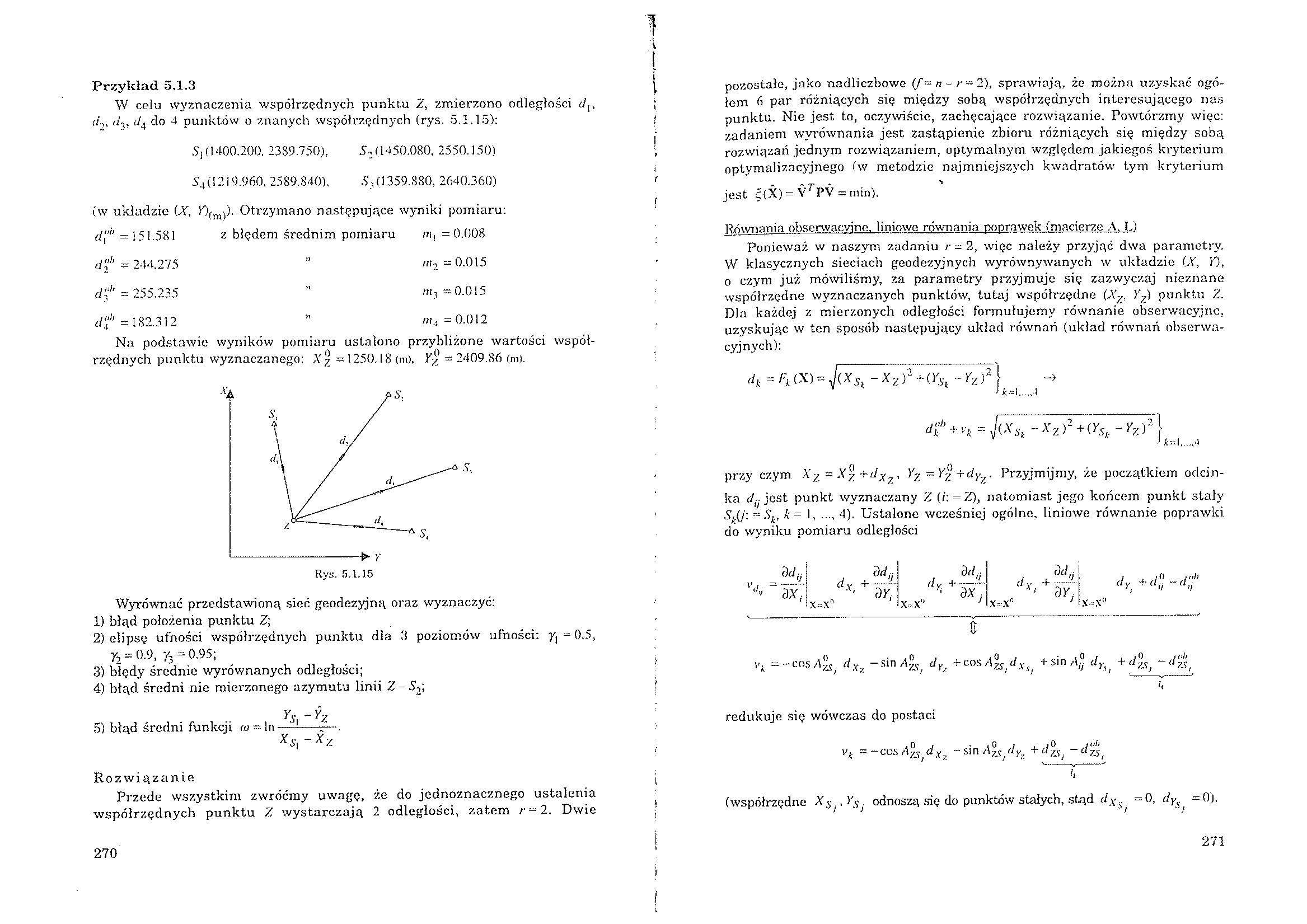
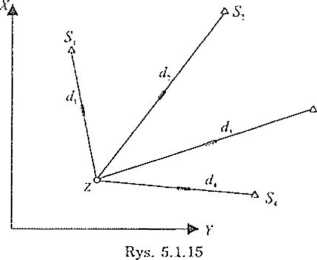
W celu wyznaczenia współrzędnych punktu Z, zmierzono odległości d,, rt'-,. d-., f/4 do 4 punktów o znanych współrzędnych (rys. 5.1.15):
,S*i (1400.200. 2389.750), 5, (1450.080. 2550.150)
S4 (1219.960. 2589.840). S} (1359.880, 2640.360)
(w układzie {X, Otrzymano następujące wyniki pomiaru:
d\"‘ =151.581 z błędem średnim pomiaru tn, =0.008
df = 244.275 ” nt 2 =0.015
df = 255.235 ” m3 =0.015
df - 182.312 ” />i.. = 0.012
Na podstawie wyników pomiaru ustalono przybliżone wartości współrzędnych punktu wyznaczanego: Xy =1250.18 (m), Yy =2409.86 (m).
Wyrównać przedstawioną sieć geodezyjną oraz wyznaczyć:
1) błąd położenia punktu Z;
2) elipsę ufności współrzędnych punktu dla 3 poziomów ufności: y, - 0.5, y2 = 0.9, y, - 0.95;
3) błędy średnie wyrównanych odległości;
4) błąd średni nie mierzonego azymutu linii X-S2',

5) błąd średni funkcji io - In
Rozwiązanie
Przede wszystkim zwróćmy uwagę, że do jednoznacznego ustalenia współrzędnych punktu Z wystarczają 2 odległości, zatem r — 2. Dwie
pozostałe, jako nadliczbowe (f~n-r- 2), sprawiają, że można uzyskać ogółem 6 par różniących się między sobą współrzędnych interesującego nas punktu. Nie jest to, oczywiście, zachęcające rozwiązanie. Powtórzmy więc: zadaniem wyrównania jest zastąpienie zbioru różniących się między sobą rozwiązań jednym rozwiązaniem, optymalnym względem jakiegoś kryterium optymalizacyjnego (w metodzie najmniejszych kwadratów tym kryterium
jest ę{X) = VrPV=min).
Równania obserwacyjne, liniowe równania poprawek (macierze A. L)
Ponieważ w naszym zadaniu r -2, więc należy przyjąć dwa parametry. W klasycznych sieciach geodezyjnych wyrównywanych w układzie (X, >0, o czym już mówiliśmy, za parametry przyjmuje się zazwyczaj nieznane współrzędne wyznaczanych punktów, tutaj współrzędne {Xy, Yy) punktu Z. Dla każdej z mierzonych odległości formułujemy równanie obserwacyjne, uzyskując w ten sposób następujący układ równań (układ równań obserwa-
% av'/
|
ód- |
ód j |
|
d + ± X' ÓYt |
dy +—i |
|
Yi ÓX. | |
|
X-Xn |
|
cyjnych): | ||
|
kxSt-X7y--HYSl |
~>z )M >k~\.....4 | |
|
df> |
• vk - ^j(Xsk -xzy + (YSf. - >'z)" | f ^ ^ | |
|
przy czym Xy = |
x?.+‘iXz, yz = y| |
-5- dYy ■ Przyjmijmy, że początkiem odcin |
ka djj jest punkt wyznaczany Z (/: = Z), natomiast jego końcem punkt stały Sk(J: -Sk, k -- 1, ..., 4). Ustalone wcześniej ogólne, liniowe równanie poprawki do wyniku pomiaru odległości
vk = - cos AyS dXy - sin Ays dY/ + cos Ays dx{ + sin A® dr^ + dys^
redukuje się wówczas do postaci
vk ~-cos AysdX7 - sin AySdY? -dy}t
V. V
(współrzędne XS.,YS. odnoszą się do punktów stałych, stąd dxs. ~^Ys = A).
271
Wyszukiwarka
Podobne podstrony:
IMGP3579 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
8. 5—(2,——) jest środkiem odcinka AB, gdzie A—(— 1 — ,3). Wyznacz współrzędne punktu B. 9.
IMGP3578 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
IMGP3579 Obliczyć wartość siły parcia na powierzchnię płaską F. Wyznaczyć współrzędne punktu przyłoż
WYZNACZENIE WSPÓŁRZĘDNYCH PUNKTU P - OBLICZENIA Dane: Pomierzone: A (5405017,38; 4555200,39) B
WYZNACZENIE WSPÓŁRZĘDNYCH PUNKTU PP - OBLICZENIA Dane: Pomierzone: Wyznaczane: P
c10a i rok i serii budownictwo Rok akademicki 2006/2007Ćwiczenie nr 10 Zad. 1 rys. 1 - 4 Wyznaczyć r
4.2. PROSTE ALGORYTMY SORTOWANIA TABLIC 10 Przykład. Funkcja wyznaczająca sumę wartości elementów z
mechanika21 — wyznaczenie współrzędnych punktu A e e e * > ; r*S = ML *A >*A *A5, s, *t (1.87)
Zadanie 3. (2 pkt) Punkt P należy do odcinka o końcach A(-l,-l) i B(7,5). Wyznacz współrzędne punktu
24197 wektory cz 2 13. Dany jest odcinek AB f taki, że A(2; - 5),B(- 4; + 7). Wyznacz współrzędne pu
5 biegunowo, wykorzystując oczywiście wcześniej wyznaczone współrzędne punktu 3.Oczywiście punkt 4
058(1) Rozwiązanie: 1) Znajdujemy współrzędne punktu styczności: x = — 1, y = 1, z— — 1 (podstawiają
Zadania do rozdziału 2.168 2.10. Wyznacz współrzędne takiego punktu A, że styczna
geo1 x X2=? X! Y, Y2=? Zad. 2 Obliczenie współrzędnych punktu Wyznaczyć: współrzędne X2, Y2 punktu 2
więcej podobnych podstron