mechanika112
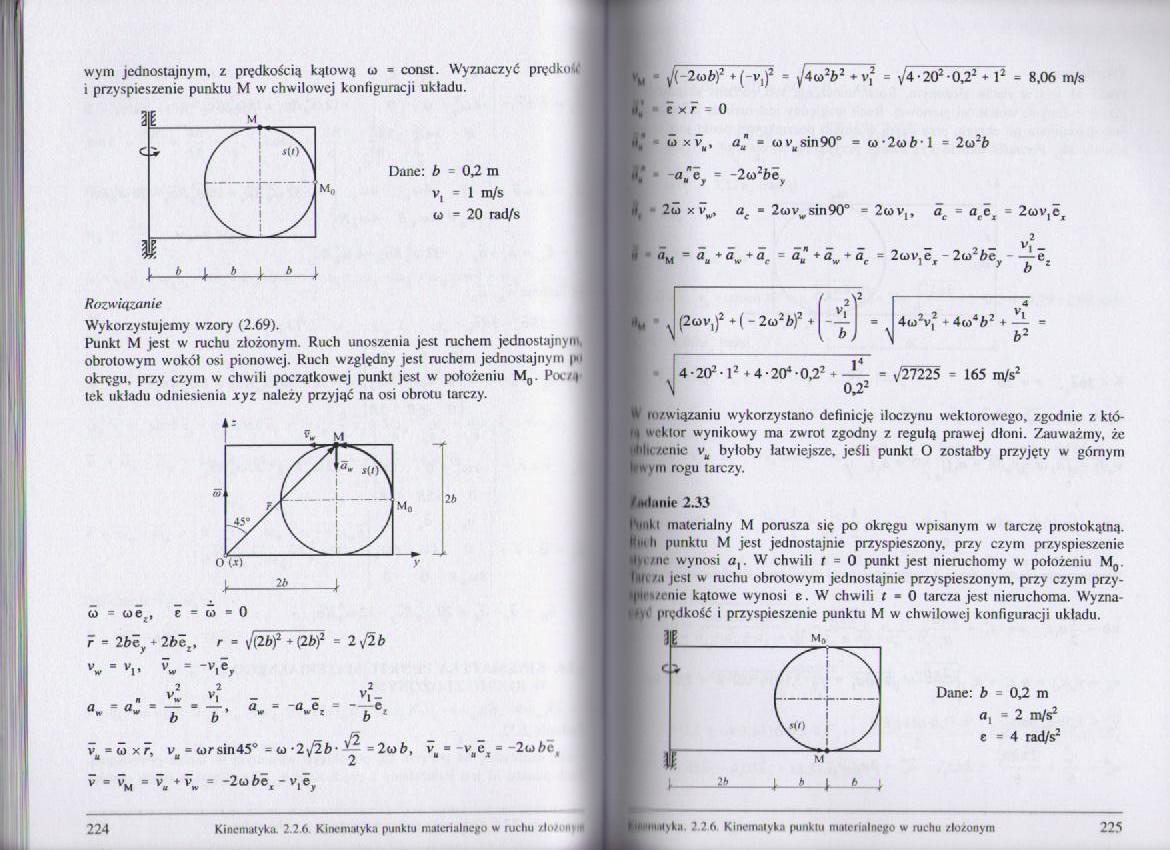
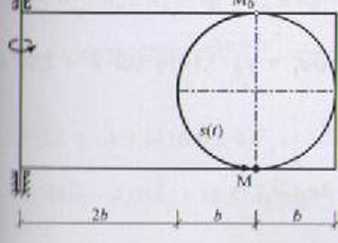
wym jednostajnym, z prędkością kątową u> = const. Wyznaczyć prędko *5 i przyspieszenie punktu M w chwilowej konfiguracji układu.
S.
I-fe—ł—+ * I
U
Dane: b - 0,2 m
v, =■ 1 m/s o = 20 rad/s
Rozwiązanie
Wykorzystujemy wzory (2.69).
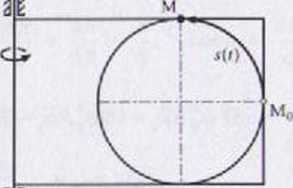
Punkt M jest w ruchu złożonym. Ruch unoszenia jest ruchem jednostajnym, obrotowym wokół osi pionowej. Ruch względny jest ruchem jednostajnym okręgu, przy czym w chwili początkowej punkt jest w położeniu M0. Pot/u tek układu odniesienia xyz należy przyjąć na osi obrotu tarczy.
€ = (O « 0
r = 2 6ey + 2 bez, r =

w = oe
y[2bf + {2b)‘ = 2 \j2b

w * b 1
vg ■ vuCł = lube.
vu = w x r, vu = cir sin45° = <a
V - VM = V, * v„ = -2(o 6ef - v,er
224
Kinematyko. 2.2.6 Kinematyka punktu muicnalnctfo w ruchu /In/i-nt
- ^(-2+(-v,)2 = finty * v? = v4 • 202• 0,22 ♦ l2 = 8,06 m/s
- c x r = 0
u xvM, a* ■ wt^sinęO0 = o)-2w/>l = 2o26 • -0"^ = -2 <o26ev

2
2
^por.f .(-202*)2*
= 4ui2v,2 - 4(o*b2

V,
b) \
4 * 202 12 M-204 0^2 + — = ^7225 - 165 m/s2
N 0.22
m/wiązaniu wykorzystano definicję iloczynu wektorowego, zgodnie z któ-" flor wynikowy ma zwrot zgodny z regułą prawej dłoni. Zauważmy, że /cnie va byłoby łatwiejsze, jeśli punkt O zostałby przyjęty w górnym viii rogu tarczy.
lunie 2.33
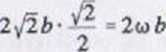
uh materialny M porusza się po okręgu wpisanym w tarczę prostokątną. »m h punktu M jest jednostajnie przyspieszony, przy czym przyspieszenie I7IIC wynosi ar W chwili r = 0 punkt jest nieruchomy w położeniu M0 i m jest w ruchu obrotowym jednostajnie przyspieszonym, przy czym przy-fs/uiie kątowe wynosi e. W chwili t ■ 0 tarcza jest nieruchoma. Wyzna*
< prędkość i przyspieszenie punktu M w chwilowej konfiguracji układu, lir .*
Dane: b - 0,2 m
n, = 2 m/s2 c = 4 rad/s2
225
miiInLi 2.2 A Kinematyka punktu matorminogo w mchu /.łożonym
Wyszukiwarka
Podobne podstrony:
DSC00294 (17) wym jednostajnym, z prędkością kątową <o = const. Wyznaczyć prędko^ i przyspieszeni
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
Mechanika kolo gr B 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w danym położen
Mechanika kolo gr A -■ ...... ■ 1. Wyznacz i narysuj wektory prędkości i przyspieszenia punktu D w d
mbm rok nizej Zad. 1. Dla zadanego mechanizmu (jak na rys.) wyznaczyć prędkość i przyspieszenie
zad 1 Kinematyka Bbd. 1 (KINEMATYKA) Znaleźć dla zadanego położenia mechanizmu prędkość i przyspiesz
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = co ■ h; = o> ■ -
82352 Mechanika28 RUCH JEDNOSTAJNY PO OKRĘGU v = const Ao! 1 V s = A0Aj - r as r-a
Slajd11 Rrzyklod 14. I. Obliczyć prędkość i przyspieszenie punktu B mechanizmu korbowo-wodzikowego
Mechanika ogolna0048 natomiast prędkość liniowa punktu należącego do bryły: v; = m
gr B V,a i motocykl Zad. 1 Znaleźć dla zadanego położenia prędkość i przyspieszenie punktu B i C.0v
więcej podobnych podstron