2
\
, jeśli
Właściwości: antypi-zemienność, iloczyn wektorowy me jest przemienny
A II D A \ D _ 0
wektory są równoległe to iloczyn wektorowy równa się zeru 11 (bo sin(180*=0)
—»
Przykład: moment pędu punktu materialnego ( £ ) jest iloczynem wektorowym wektora łączącego
—»
punkt, względem którego określa się moment pędu i punkt ciała ( r ) oraz wektora pędu punktu
—»
materialnego ( P ):
-» -» -»
L = r x p
5. Układy współrzędnych (kartezjański,biegunowy, sferyczny, walcowy) -opis.
Układ współrzędnych: funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg liczb rzeczywistych zwanych współrzędnymi punktu Rodzaje układów współrzędnych:
kartezjański- zwany również prostokątnym układem współrzędny cli, w którym zadane są: punkt zwany środkiem lub początkiem układu, którego wszystkie współrzędne są równe zeru, zestaw n-osi liczbowych zwanych osiami układu współrzędny cli, z których każde dwie są do siebie prostopadłe i któiych zera znaj duj ą się w wybranym początku układu.
biegunowy- układ współrzędnych na płaszczyźnie wyznaczony przez pewien punkt O zwany biegunem, oraz półprostą OS o początku w punkcie O, zwaną osią biegunową Każdemu punktowi P jńaszczyzny przypisujemy je go współrzędne biegunowe: promień wodbący punktu P do jego odległość | OP| od bieguna, amplituda punktu P to wartość kąta pomiędzy półprostą OS a wektorem sferyczny- układ współrzędnych w trójwymiarowej przestrzeni 6. Klasyfikacja ruchów w kinematyce.
Kinematyka - zajmige się związkami między położeniem, prędkością i przyspieszeniem badanej cząstki
Klasyfikacja mchów: ze względu na tor ruchu (tor jest to linia wyznaczona przez chwilowe położenie ciała podczas ruchu) - nich prostoliniowy (tor jest limą prostą) oraz ruch krzywoliniowy (tor jest linią kizywą w tym okrąg); ze względu na zależność położenia od czasu - jednostajny, jednostajnie przyspieszony, pozostałe
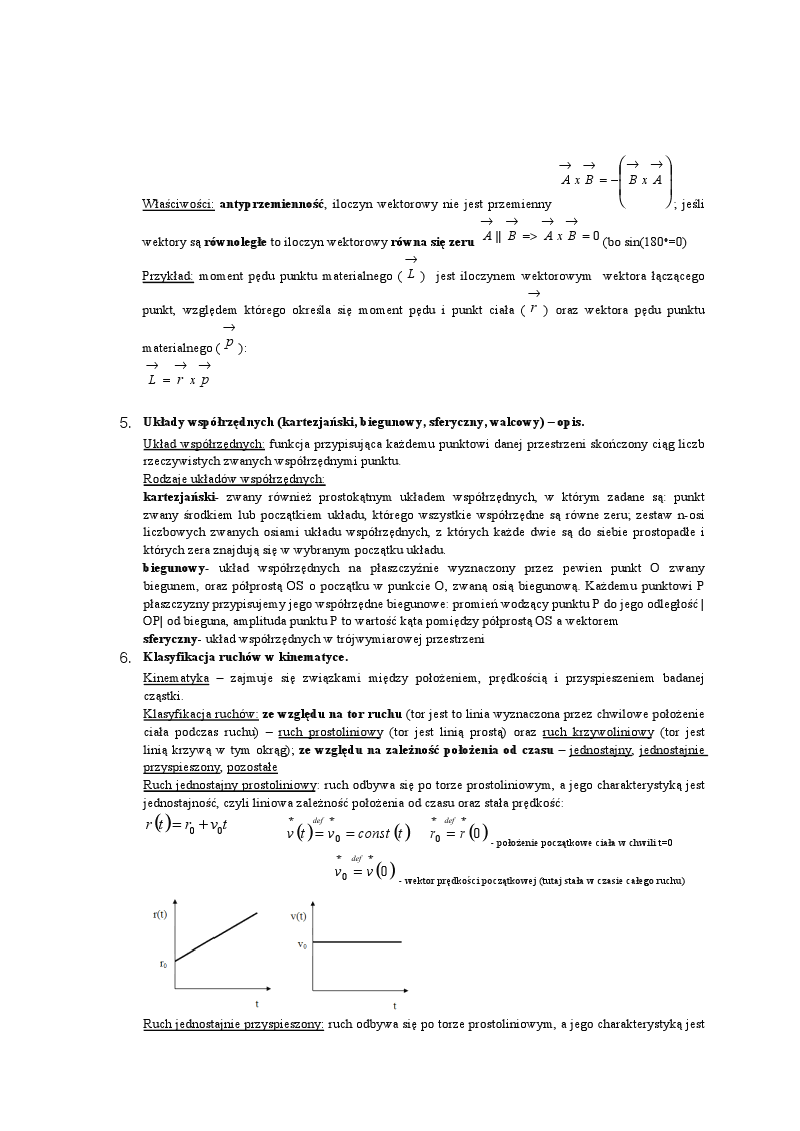
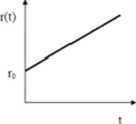
Ruch jednostajny prostoliniowy: ruch odbywa się po torze prostoliniowym, a jego charakterystyką jest jednostajność, czyli liniowa zależność położenia od czasu oraz stała prędkość:
* dy *
const(t) r0=r(o)
potoznut początkowe ci*ł» w chwilit=0
♦ Jif *
wektor prędkościpoczątkowej (tutaj stała w czasie całego zucha)
v0 = v(o)
v(t)
v®
t
Ruch jednostajnie przyspieszony: ruch odbywa się po torze prostoliniowym, a jego charakterystyką jest
Wyszukiwarka
Podobne podstrony:
Iloczyn wektorowy wektorów C = AxB C-A = 0 C B = 0 C = A • B sina
Zdjęcia 0171 Uęt ZADANIA (c) Sumę i różnicę wektorów afbia b. Odp. a + b * 2x + 6y + z. (f) Iloczyn
b) Iloczyn wektorowy Własności iloczynu wektorowego: ci x b - - b x ci [aJtb^xc = axc + bxc axb - 0
P1000909 Inne właściwości iloczynu wektorowego aJ by cy ax K Cx r dx{jfxdj*=:S(3od)-e(aoB)
Iloczyn wektorowy Twierdzenie Składowe wektora v = a x b obliczamy ze wzoru: i j k axb = ax
Slajd26 Iloczyn wektorowy Jeżeli a^O i 6*0 to axb = 0 <^> a\b axb = J k dy by b2
2 (AxB)2=(AxB)(AxB). Ponieważ każdy z iloczynów wektorowych, po prawej stronie tego równania, można
img069 (21) Z kolei podwojony iloczyn wektorowy prędkości kątowej • i prędkości względnej vw jest pr
skrypt wzory i prawa z objasnieniami38 74 Ruch obrotowy ciała ■ Jak wynika z własności iloczynu wekt
Slajd31 Moment pędu pojedynczej cząstki Pochodna iloczynu wektorowego funkcji a =
P1010936 (3) Czyli V ) - )r(t)sina - (wzór na modli iloczynu wektorowego)j
do Organizatora praktyk z prośbą o zorganizowanie mu prakty ki lub jeśli Organizator me jest w stani
Jest to iloczyn wektorowy prędkości i wektora indukcji B. Siła działająca na ładunek jest prostopadł
więcej podobnych podstron