Automatyka
2.2.9 Człony korekcyjne pierwszego rzędu
Ogólna postać transmitancji członów korekcyjnych jest następująca:
G(s) = k
l + Txs l + T2s
gdzie k - współczynnik wzmocnienia Ti, T2 - stałe czasowe
Zależnie od tego, która stała czasowa jest większa, człon korekcyjny przyspiesza lub opóźnia fazę w układzie korygowanym.
a) Człon opóźniający fazę
Jeżeli w wyrażeniu na transmitancję członu korekcyjnego dwie stałe czasowe zastąpi się jedną i współczynnikiem a równym stosunkowi Ij/F2, to transmitancja członu opóźniającego przyjmie następującą postać:
1 + Ts 1 + a Ts?
Przebieg odpowiedzi skokowej członu opisany jest wyrażeniem
h(t) = a •
( t
l-e aT
1
+—e aT
a
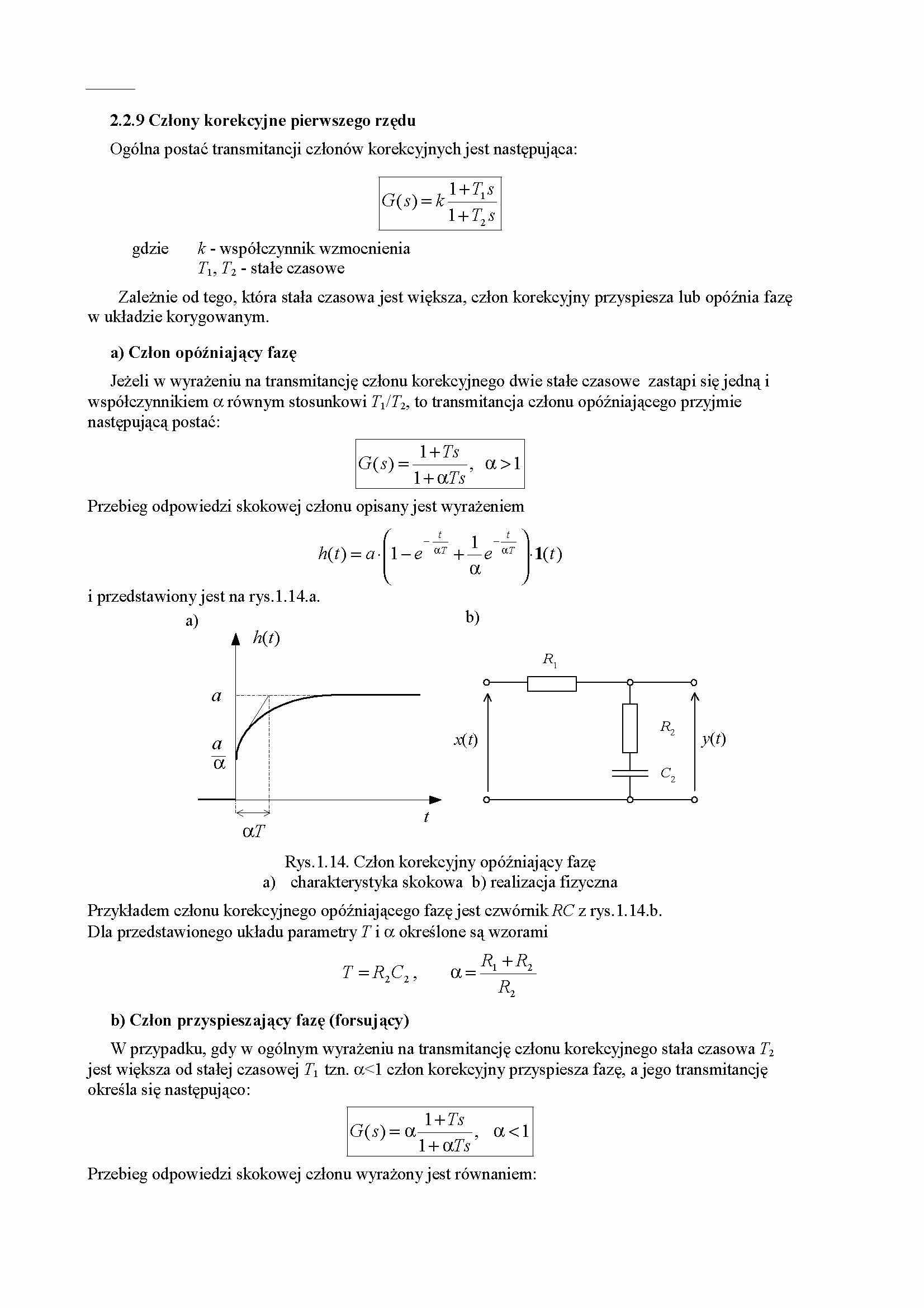
i przedstawiony jest na rys. 1.14.a.
V

Ąt)
b)
R,
1
y(t)
Rys. 1.14. Człon korekcyjny opóźniający fazę a) charakterystyka skokowa b) realizacja fizyczna
Przykładem członu korekcyjnego opóźniającego fazę jest czwómik i?C z rys. 1.14.b. Dla przedstawionego układu parametry T i a określone są wzorami
T =R2C2,
R2
b) Człon przyspieszający fazę (forsujący)
W przypadku, gdy w ogólnym wyrażeniu na transmitancję członu korekcyjnego stała czasowa T2 jest większa od stałej czasowej 7i tzn. a<l człon korekcyjny przyspiesza fazę, a jego transmitancję określa się następująco:
1 + Fs
G(s) = a-, a<l
1 + a Ts
Przebieg odpowiedzi skokowej członu wyrażony jest równaniem:
Wyszukiwarka
Podobne podstrony:
Scan0024 32 Metoda rezolucji. Elementy logiki pierwszego rzędu 2. Tworzymy postać klauzulową: 5 -
DSC00525 (9) Typowe elementy automatyki Elementy inercyjne pierwszego rzędu y(t) rs+i G(s) GFCODStws
75197 Wprowadzenie do MatLab (75) Ogólna postać p-normy wektorowej określona jest następująco: V <
Lekcja 88.1. Podstawowe człony układów automatyki - c.d 8.1.1. Człon inercyjny Il-rzędu Transmitancj
P1050606 Rys. 2 Odpowiedź elementu inercyjnego pierwszego rzędu na wymuszenie skokowe. 3) całkujące,
IMG 22 rSflufa^ prtx^a^cł$fficft* Transmitancja operatorowa członu inercyjnego ii rzędu ma postać: Ł
DSC00432 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI pierwszego rządu Przyrządy pomiarowo pierwsze
Bereziewicz, psychologia ogólna, Automatyczna regulacja emocji. W pierwszym okresie życia dziecka pe
041 bmp odpowiedzi przetwornika pierwszego rzędu przy wymuszeniu w postaci skoku prędkości jest równ
Człon różniczkujący rzeczywisty w automatyce Ogólna postać równ, układu; Tx’=-alfa x+ alfa u, y=-alf
CCF20100527�001 45. Definicja równania różniczkowego zwyczajnego rzędu pierwszego.
więcej podobnych podstron