fota2

Zestaw 3.
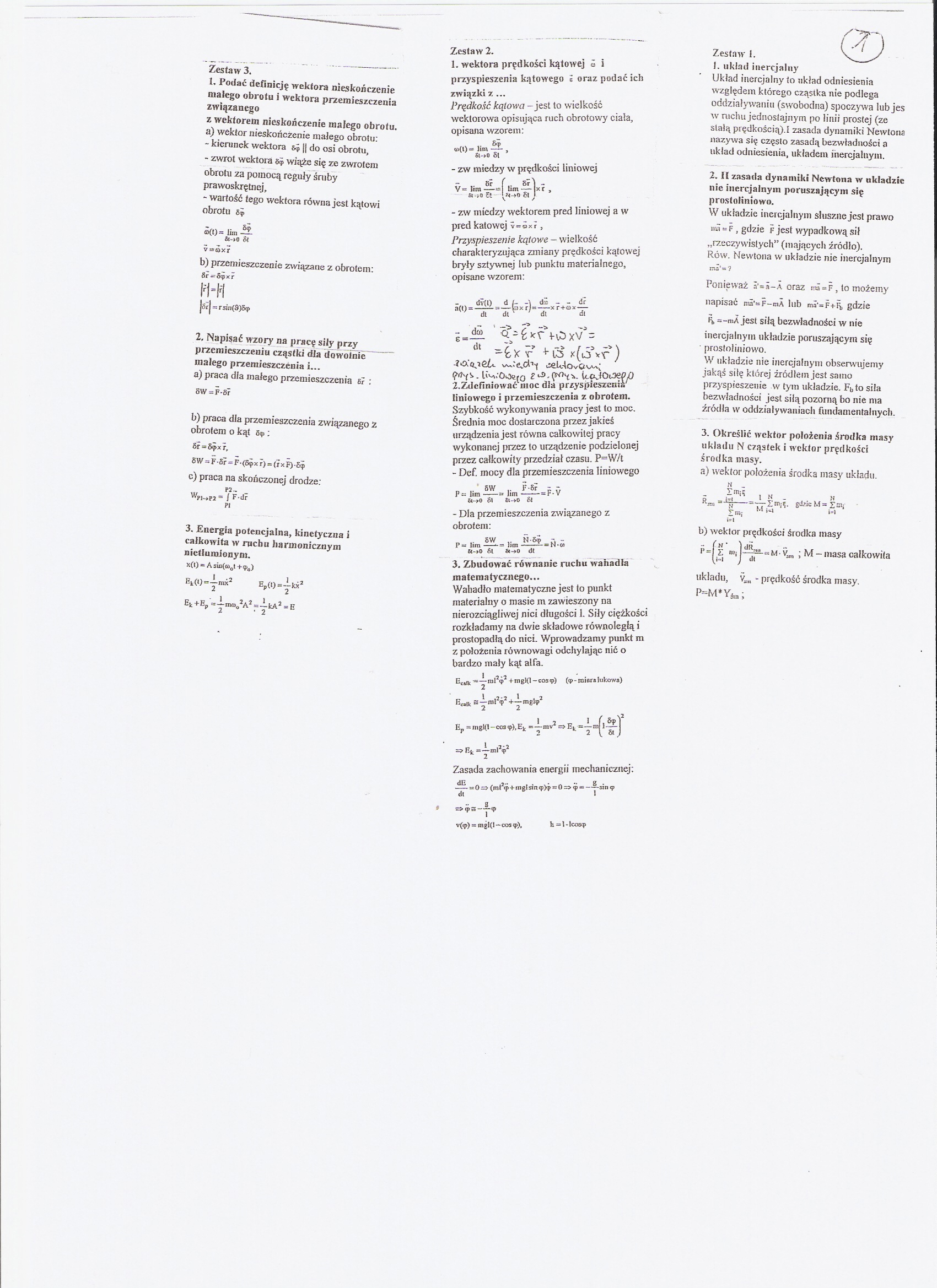
t. Podać definicję wektora nieskończenie małego obrotu i wektora przemieszczenia związanego
z wektorem nieskończenie małego obrotu.
a) wektor nieskończenie maiego obrotu:
- kierunek wektora 891| do osi obrotu,
- zwrot wektora $9 wiąże się ze zwrotem obrotu za pomocą reguły śruby prawoskrętnej,
- wartość tego wektora równa jest kątowi obrotu £9
lim —-St-m 81
v ooxr
b) przemieszczenie związane z obrotem: tr«&p«r
M
|st| «=r 5111(8)89
2. Napisać wzory na pracę siły przy przemieszczeniu cząstki dla dowolnie małego przemieszczenia i... a) praca dla małego przemieszczenia Br :
8W=F-8r
b) praca dla przemieszczenia związanego z obrotem o kąt 89:
6r-8fxr,
8W=F-5r «F-(69x r)=(JxF)-89
c) praca na skończonej drodze:
n
3. Energia potencjalna, kinetyczna i całkowita w ruchu harmonicznym nictlumionym.
x(I)-A3in(<tt0l+9o)
Ek(()=yimiJ E,(l)-i-l«*
Ek+Ep «-i-inffl0,A,»YkAJ *B
Zestaw 2.
1. wektora prędkości kątowej ó i przyspieszenia kątowego i oraz podać ich związki z...
Prędkość kątowa - jest to wielkość wektorowa opisująca ruch obrotowy ciała, opisana wzorem:
Sb
m(t)= lim — ,
St->0 St
- zw miedzy w prędkości liniowej
- Sr f ś?) -V“ lim—=1 lim —-lxt
a-i# 5 \H->o 8l)
- zw miedzy wektorem pred liniowej a w pred kątowej v«oxr ,
Przyspieszenie kątowe - wielkość charakteryzująca zmiany prędkości kątowej bryły sztywnej lub punktu materialnego, opisane wzorem:
- dvU) d f- -) dn - - dr
iv£xva=
,dl Hkt x(ó%r )
•**G.'<o6u w~:ekcł1i iseWovO\A^
liwooem [LOjOtKOfl
2.Zdcfiniować moc dla przyspieszenia' liniowego i przemieszczenia z obrotem. Szybkość wykonywania pracy jest to moc. Średnia moc dostarczona przez jakieś urządzenia jest równa całkowitej pracy wykonanej przez to urządzenie podzielonej przez całkowity przedział czasu. P=W/t
- Def. mocy dla przemieszczenia liniowego
r.h£L.i.!£. f-v
U >0 SI 8l->0 SI
- Dla przemieszczenia związanego z obrotem:
„ sw „ fis® r, -
P« lim ——■= lim-—=N-cn
&>o St 6( ->o <łt
3. Zbudować równanie ruchu wahadła matematycznego...
Wahadło matematyczne jest to punkt materialny o masie m zawieszony na nierozciągłiwej nici długości 1. Siły ciężkości rozkładamy na dwie składowe równoległą i prostopadłą do nici. Wprowadzamy punkt m z położenia równowagi odchylając nić o bardzo mały kąt alfa.
E~iv 1 mgKI -C039) (9-mitr*lukowa)
Ejj —i-ml^ł?
Zasada zachowania energii mechanicznej:
dC j. , n o
—- m 0 =» (ml 9+mgl sin 9)9 >0 =» 9 «-—sin 9
Zestaw I.
1. układ inercjalny Układ inercjalny to układ odniesienia względem którego cząstka nie podlega oddziaływaniu (swobodna) spoczywa lub jes w mchu jednostajnym po linii prostej (ze stałą prędkością).! zasada dynamiki Newtona nazywa się często zasadą bezwładności a układ odniesienia, układem inercjalnym.
2. H zasada dynamiki Newtona w układzie nie inercjalnym poruszającym się prostoliniowo.
W układzie inercjalnym słuszne jest prawo nu=f , gdzie f jest wypadkową sił „rzeczywistych” (mających źródło).
Rów. Newtona w układzie nie inercjalnym
ma‘w?
Ponieważ }®i-A oraz nó-F, to możemy napisać m»*wF—oa lub na'-F+ą, gdzie ^ =-mA jest siłą bezwładności w nie inercjalnym układzie poruszającym się ' prostoliniowo.
W układzie nie inercjalnym obserwujemy jakąś silę której źródłem jest saino przyspieszenie w tym układzie. Fb to siła bezwładności jest siłą pozorną bo nie ma źródła w oddziaływaniach fundamentalnych.
3. Określić wektor położenia środka masy układu N cząstek i wektor prędkości środka masy.
a) wektor położenia środka masy układu.
n _
• F<m‘* 1 > ■ n
*»="*?}-=-—!>,•(. gdrieM=raij
r-i Mm w
w
b) wektor prędkości środka masy
F-fg ; M-masacałkowita
układu, vL - prędkość środka masy. P=M*Yj0ł;
h = 1 - leos®
v(9)Bmgl(l-ca9X
Wyszukiwarka
Podobne podstrony:
fota2 Zestaw 3. t. Podać definicję wektora nieskończenie małego obrotu i wektora
Zdjęcie0683 Zestaw 1 . Podać definicje i interpretacje fizyczne prędkości fazowej i grupowej. L Zapi
CCF20111017�000 Matematyka Podać definicję wektora. Podać wzory do obliczania iloczynu skalarnego dw
Wektor wypadkowy małego obrotu ^0 jest równy sumie geometrycznej wektorów małych obrotów
Zestaw 9 tGŁ.MI OFM T K V ST* TU A O/JFNNK ll ROK ROI N1CTWO ZESTAW IX & Ki 1. Podać defini
m16 . PRZYKŁADOWY ZESTAW PYTAŃ EGZAMINACYJNYCH A (4 punkty). Podać definicję granicy lim f(u) = co w
m17 .3?.RZYKLADOWY ZESTAW PYTAŃ EGZAMINACYJNYCH u—*—©o A (4 punkty). Podać definicję granicy Jim. /
IMAG0153 LAB 7* Imię i nazwisko (JnfiGiifi... Dwawi ffi* Iprafaarilass i -i I. Pod
obowiazkowy 2 1 1) Podać definicję miary decybelowej ilorazu mocy. W inny (równoważny) sposób przed
skanowanie0015 (55) hiszpańska ( 1978) niemiecka ( 1969 ) Uzupełnić ( podać defini
Klucz kandydujący Minimalny zestaw atrybutów definiujący krotkę (wiersz) Relacja (tabela) może
więcej podobnych podstron