Image6
Projektowany w przykładzie układ można rozwiązać inaczej, za pomocą licznika rr'.■■•■noległego, kiery realizuje również zadany diagram przejść; porównując jednak układ _r;- .1 zowany za pomocą, pamięci siałej z układem licznikowym widać istotna różnicę ;r . ' tymi układami. Sposób funkcjonowania układu licznikowego wynika z z W. :orr,leczy poszczególnymi elementami układu, jakakolwiek zmiana wymaga zzY.-to-zenia orccesu projektowania , którego wynikiem są zmiany połączeń i
Jcjna /ymiana elementów. Postępowanie takie nie jest łatwe. Natomiast w . ,r; z zamieciąstała, program działania zapisany jest w pamięci ROM i zmiany w z z:e wymagajgjedynie jej przeprogramowania.
Korzyści ze stosowania pamięci stałych do realizacji układów sterujących : --'.czają się ze wzrostem złożoności układów.
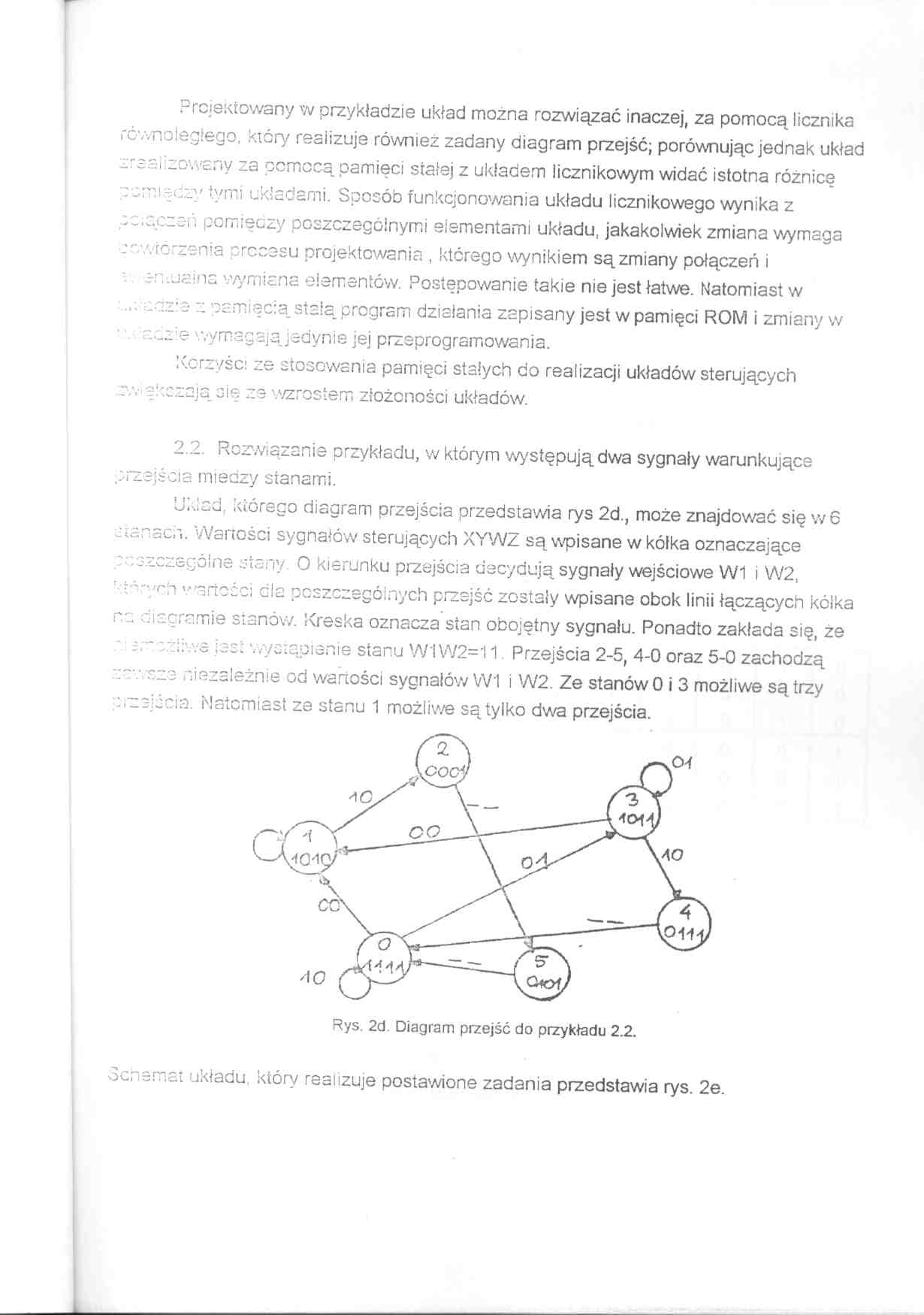
2.2. Rozwiązanie przykładu, w któnym występują dwa sygnały warunkujące
przejścia mieczy stanami.
Układ, którego diagram przejścia przedstawia rys 2d., może znajdować się w 6 'sc,-.. Wartości sygnałów sterujących XYWZ są wpisane w kółka oznaczające -zczecjóine steny. O kierunku przejścia decydują sygnały wejściowe W1 i W2,
■ -ó v irtoćci dla poszczególnych przejść zostały wpisane obok linii łączących kółka cc. z i agrarnie stanów. Kreska oznacza stan obojętny sygnału. Ponadto zakłada się, ze ' va ;:-c. •.//siąpienie stanu W‘IW2=11 Przejścia 2-5, 4-0 oraz 5-0 zachodzą :~-.YSze niezależnie od wartości sygnałów W1 i W2. Ze stanów 0 i 3 możliwe są trzy :.zejścia, Natomiast ze stanu 1 możliwe są tylko dwa przejścia.
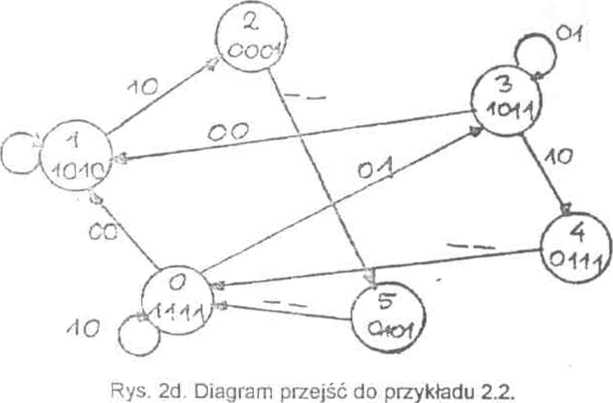
icrsmat układu, który realizuje postawione zadania przedstawia rys. 2e.
Wyszukiwarka
Podobne podstrony:
skanuj0060 (57) Rozdział 3. ♦ Instrukcje sterujące i funkcje 73 można go przedstawić za pomocą instr
img18 Listy Listy można tworzyć w CSS za pomocą style Pozwala to na lepszą kontrolę nad typami
Mechanika03 Ruch punktu można również zapisać za pomocą wektora iiomienia wodzącego (we współrzędnyc
009 3 Waga. Przy wielu doświadczeniach można odważać substancje za pomocą wagi do listów, która ma d
CCF20091117�008 240 CIĄGI Uwaga. Podane na poprzedniej stronie własności granic można zapisać w skró
CCF20100308�006 Czas efektywny można również obliczyć za pomocą iloczynu czasu nominalnego i wskaźni
55946 star266185 Układ kierowniczy 185 pompy za pomocą kalibrowanego otworu K. Wraz ze wzrostem iloś
100i87 Budowę kwiatu można też scharakteryzować za pomocą wzoru kwiatowego. We wzorze tym poszczegól
więcej podobnych podstron