out 0072
28
c) regulator typu D (różniczkują) opisany funkcją
(3.4)
c) regulator typu PI (proporqonalno-całkujący) opisany funkcją przejścia
Gr(s)=k„(l+1^) (3.5)
d) regulator typu PD (proporcjonalno-różniczkujący) o funkcji przejścia
Or(s)=kp(l+Tds) (3.6)
Zestawienie typowych charakterystyk czasowych i częstotliwościowych poszczególnych typów regulatorów pokazano na rys. 3.1.
W konstrukcji podstawowych typów regulatorów przemysłowych stosuje się najczęściej wzmacniacze operacyjne z odpowiednio dobranym ujemnym sprzężeniem zwrotnym i impedancją wejściową (pasywne dwójniki lub czwómiki RC) pozwalającymi uzyskać żądaną funkcję przejścia regulatora.
3.1.1. Regulator proporcjonalny - P
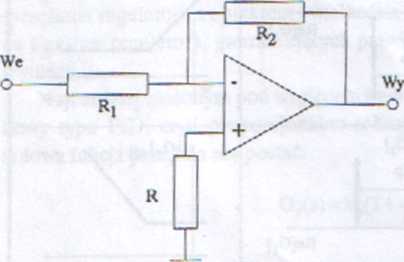
Kys. 3.2. Realizacja regulatora typu P.
Realizację tego regulatora (rys. 3.2) uzyskuje się na bazie wzmacniacza operacyjnego z rezystancyj-nym sprzężeniem zwrotnym (R2) i rezystancyjnym wejściem (Rj). Wartości tych rezystanqi określają stałą proporcjonalności regulatora kp=R2/R]. Ustawianie wartości kp dokonywane jest zazwyczaj poprzez zmianę rezystancji R2.
Zastosowanie regulatora typu P do sterowania obiektem daje możliwość zmiany wzmocnienia w lorze głównym układu regulacji, a w efekcie, wpływ na wartość uchybu ustalonego i warunki stabilności.
3.1.2. Regulator całkujący -1
Wzmacniacz operacyjny w klasycznym układzie integratora (pojemnościowe sprzężenie zwrotne - rys. 3.3) pozwala na rcalizaq'ę operacji całkowania w szerokim zakresie zmian wartości stałej całkowania Tj = RC.
Wyszukiwarka
Podobne podstrony:
222 (28) Prawa strona równania (12.7) jest w przybliżeniu różnicą między funkcją liniową a funkcją n
Układy ciągłe i dyskretne Ciągłe układy sterowania - wszystkie sygnały są opisane funkcjami ciągłymi
z> Przebiegi dla cyklu granicznego dla pętli zewnętrznej przy zastosowaniu regulatora typu PI w pętl
0000023 (14) 28 Kręgosłup jako centralna jednostka funkcjonalna: narząd osiowy całkowitego wyleczeni
IMGt43 (2) 148 III. Wstępne wiadomości z rachunku różniczkowego i całkowego Funkcja e jest ciągła w
s11 (18) hitlerowskie przeprowadziło pierwszy silny nalot na Hel — 28 nurkowców typu Ju 87 zaatakowa
skanuj0017a 28 Dwudzieste piąte ćwiczenie - poprawiające funkcje gruczołów - Leżąc na plecach - unos
IMG925 numanizm LiDeraKzm Materializm fSarmatyzm 33 Bwtnrtrwown*. 66. UUo* bez ślubu 28. KontaMy ty
Rozdział I Funkcja potęgowa, wygładnicza i logarytmiczna Zad ( 35 28. Uzupełnij brakujące dane w t
s11 (18) hitlerowskie przeprowadziło pierwszy silny nalot na Hel — 28 nurkowców typu Ju 87 zaatakowa
DSC00005 (28) PROGRAM TABLICUJĄCY I WYKREŚLAJĄCY ZADANĄ FUNKCJ UWAGA! 1 .Wprowadzenie instrukcji i d
DSC00006 (28) ł. I mtfhp największa różnica ciśnienia krwi istnieje jww«{4*V i Ąft
out 0088 28 Tstria jedr.tiU): f.ryihkuęch wewnętrznym, zapomniano o tym, że świadomość - jako jedyne
więcej podobnych podstron