siecic
urządzenia ARP. Kiedy poziom pilota na wyjściu łańcucha regulatorów staje się równy nominalnemu, ustala się on za pomocą ostatniego regulatora, który zmienia kierunek regulacji na przeciwny.
W tym czasie wszystkie poprzednie regulatory regulują w kierunku początkowym. Jest oczywiste, że ostatni regulator nie jest w stanie skompensować tak szybkiej zmiany poziomu na jego wejściu.
Dlatego wielkość regulowana na wyjściu łańcucha regulatorów będzie zmieniać się w stronę przeciwną do początkowej i odpowiednio wystąpi przercgulowanie.

!
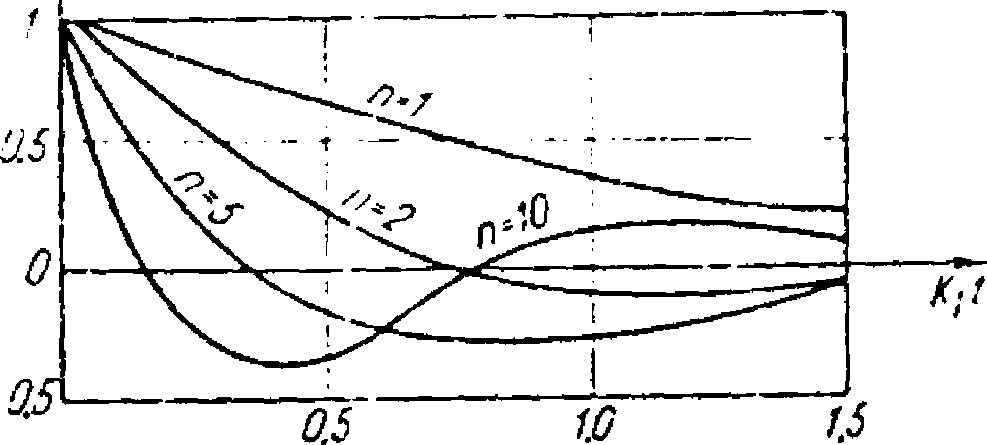
7-9. Odpowiedź łańcuchowego połączenia n układów regulacyjnych na uskok jednostkowy poziomu prądu częstotliwości kontrolnej
W końcowym momencie będzie kolejno zmieniać się kierunek regulacji regulatorów, poprzedzających ostatni. W końcu nastąpi taki moment, kiedy połowa regulatorów reguluje w kierunku początkowym, a druga — w kierunku przeciwnym do początkowego. Temu momentowi odpowiada pierwsze maksymalne ekstremum i odpowiednio maksymalna wielkość przeregulowania krzywej procesu przejściowego. Dlatego zawsze duża liczba regulatorów zaczyna regulować w kierunku przeciwnym do początkowego, w związku z czym wielkość odchyłki na wyjściu łańcucha maleje. W końcu poziom na wyjściu łańcucha regulatorów osiąga wartość nominalną i regulator ostatni znowu zmienia kierunek regulacji.
W dalszym ciągu sytuacja będzie się powtarzać z tą różnicą, że każde następne ekstremum staje się mniejsze od poprzedniego a punkty przecięcia krzywej procesu przejściowego z osią czasu będą się zawsze bardziej oddalać jeden od drugiego.
Przejdziemy teraz do bardziej szczegółowego rozpatrzenia własności dynamicznych łańcucha regulatorów idealnych.
Posługując się wzorem (7.14), określimy charakterystykę przejściową łańcucha :
H.W - J-R.W -
Obrazowi Laplacera H(s) odpowiada następująca wartość oryginału h(f):
1
(7.17)
MO = = e-‘" V (-1)^-1—y-
r-0
gdzie CZ-i — liczba kombinacji z (n— 1) elementów po v, równa
(*-q;
v\(n—v— 1)'
Wyszukiwarka
Podobne podstrony:
siecia . MAi.NA SZYBKOŚĆ REGUŁACH — Jest to największa zmiana poziomu sygnału na wyjściu regulatora
T2 jest zatkany , zatkany jest również T3. W tym przypadku T4 przewodzi i daje poziom “H na wyjściu.
Image493 jest na wejścia adresowe multipleksera. Na wyjściu multipleksera, który znajduje się w pętl
27 Na wyjściu filtru innowacyjnego pojawia sie sygnał, który
088 tif 3. PODSTAWOWE URZĄDZENIA I APARATY STACJI Jako materiał na rezystory odgromników zaworowych
DSC08347 (2) Czerwony Las nosferę poziomem tomowym na Hiroszimę i Czerwony Las znajduje się w czamob
nawyjsciufiltruinnowacyjnegopojawaisiesygnal,ktoryjesttzw Na wyjściu filtru innowacyjnego pojawia si
na wyjściu filtru innowacyjnego Na wyjściu filtru innowacyjnego pojawia sie sygnał, który jest tzw.
aliczony egzamin z matematyki na politechnic i nagle świat staje się jakby bardziej
centrum reakcji fotoukladu I przekazywany jest na cząsteczkę NADP+, która staje się fonną zredukowan
DSC02843 chociaż wskazuje na miejsce grobu i zniszczenia, staje się jednak symbolem odrodzenia życia
więcej podobnych podstron